Platines FI image – Système CCIR
I – Généralités
sur l’amplificateur FI vision
Nous avons vu dans
le chapitre 5 concernant la modulation d’amplitude, qu’à l’émission, il n’y avait
pas suppression totale mais seulement partielle d’une bande latérale. Ce sont
donc les fréquences élevées qui subissent une modulation de phase et une
réduction du taux de modulation.
Ce sont les
variations rapides de modulation qui sont concernés(transitions blanc noir et inversement).
Si l’on désire que
le signal détecté corresponde aussi parfaitement que possible au signal de
modulation, la courbe de réponse de l’amplificateur FI doit tenir compte de
cette modulation de phase et de la réduction du taux de modulation.
L’amplificateur FI
vision joue donc un rôle primordial dans la qualité de l’image.
La bande passante
très large(5 à 10 MHz selon les standards)que doit avoir l’amplificateur FI
vision, et les caractéristiques d’amplitude et de phase que le signal doit
conserver après amplification, nécessitent une conception élaborée de cet
amplificateur.
II – FI vision en
standard français
A) Courbe de
réponse type d’un amplificateur FI vision
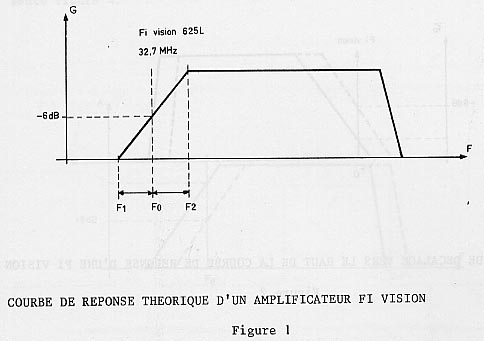
La (figure
1) représente la courbe de réponse d’un amplificateur FI vision au standard
français 625 lignes. On observe que la fréquence intermédiaire vision fo se
trouve sur le flanc incliné. Pour les fréquences de part et d’autre de fo
(comprises entre F1 et F2), l’émission comporte deux bandes latérales. Le taux
de modulation des fréquences basses se trouve donc doublé par rapport aux
autres fréquences. Il va donc falloir réduire de moitié le gain pour fo = 32,7
MHz, ce que l’on obtient en positionnant la FI vision sur le plan incliné à – 6
dB.
{kind=link}
Le flanc doit être
le plus symétrique possible par rapport à 32,7 MHz, il doit être également
linéaire.
Si la FI vision
n’est pas calée symétriquement sur le flanc incliné, il en résulte une
altération de la qualité de l’image.
Deux cas peuvent se
présenter :
a) La FI vision fo
se trouve au dessous de – 6 dB comme représenté sur
la (figure 2) .
{kind=link}
On observe que les
fréquences élevées sont favorisées par rapport aux fréquences basses (transitions
blanc noir et noir blanc). Sur l’écran, on observera une zone d’un blanc saturé
lors de la transition d’une zone noire à une zone blanche. Ceci se nomme le
phénomène de plastique.
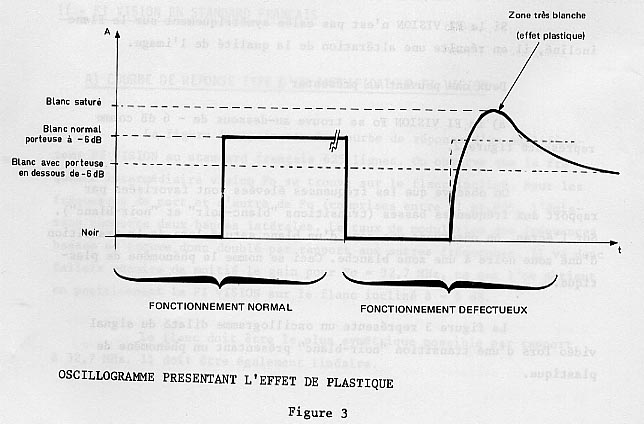
La (figure
3) représente un oscillogramme dilaté du signal vidéo lors d’une transition
noir blanc présentant un phénomène de plastique.
{kind=link}
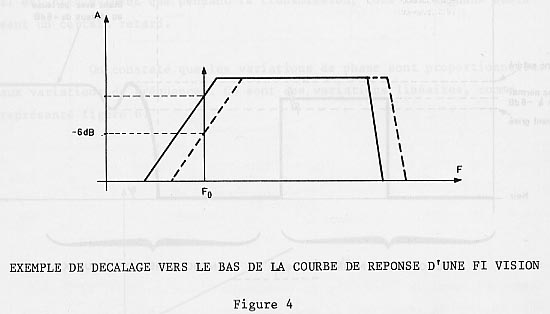
b) La FI vision se
trouve au dessus de – 6 dB comme représenté sur la (figure 4)
.
{kind=link}
La figure 4 montre
que les fréquences basses sont favorisées, par contre, les fréquences élevées
sont désavantagées, c'est-à-dire les transitions blanc noir et noir blanc. Lors
des transitions, par exemple, pour un texte en blanc sur fond noir, on
observera sur l’écran toute une zone de dégradés à la suite des lettres. Ceci
est le phénomène de traînage.
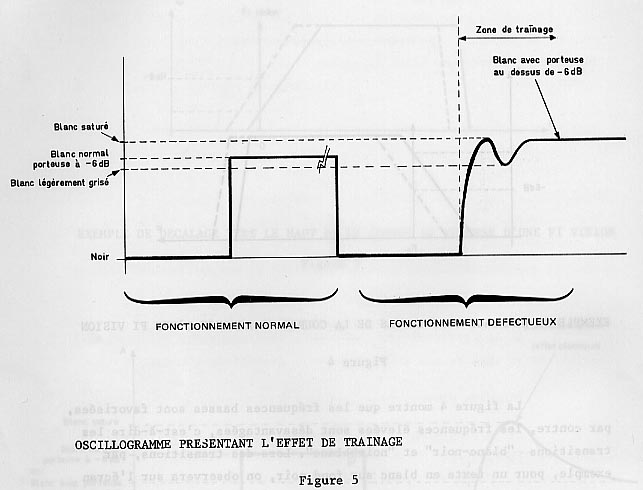
La (figure
5) représente un oscillogramme dilaté du signal vidéo lors d’une transition
présentant un phénomène de traînage.
{kind=link}
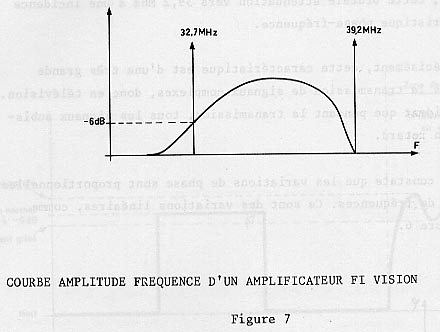
B) Forme réelle
de la courbe de réponse d’un amplificateur FI vision
Nous avons vu la
nécessité du flanc incliné côté porteuse FI vision, côté FI son, il faut une
très brutale atténuation de telle sorte qu’à la fréquence de 39,2 MHz, il n’y
ait aucune amplification de la porteuse son dans la voie vision. Cette
atténuation sera obtenue par des circuits réjecteurs accordés sur 39,2 MHz.
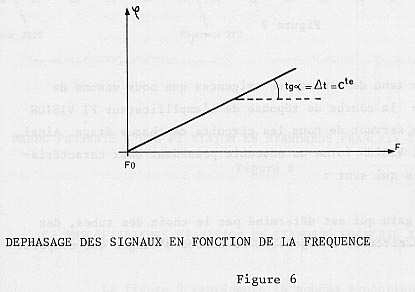
Or cette brutale
atténuation vers 39,2 MHz a une incidence sur la caractéristique phase
fréquence.
Précisément, cette
caractéristique est d’une très grande importance dans la transmission de
signaux complexes, donc en télévision. Il est bien évident que pendant la
transmission, tous les signaux subissent un certain retard.
On constate que les
variations de phase sont proportionnelles aux variations de fréquences. Ce sont
des variations linéaires, comme représenté (figure 6) .
{kind=link}
D’autre part, il
existe une relation entre la courbe phase fréquence et la courbe amplitude
fréquence, ce qui signifie que si l’on veut une caractéristique phase fréquence
linéaire comme décrit (figure 6) , la courbe de réponse
amplitude fréquence doit être en forme de cloche.
Mais dans la
pratique, cette courbe aura une allure du type de la (figure
7) , due à la nécessité de réjecter la porteuse son à 39,2 MHz.
{kind=link}
Compte tenu de
toutes les exigences que nous venons de citer, la forme de la courbe de réponse
de l’amplificateur FI vision sera obtenue en se servant de tous les circuits de
chaque étage. Ainsi, l’amplificateur FI vision forme un ensemble possédant deux
caractéristiques essentielles qui sont :
a) Le gain qui est
déterminé par le choix des tubes, des transistors ou des circuits intégrés et
le nombre d’étages que comporte l’amplificateur.
b) Le respect de la courbe
de réponse qui nécessite l’emploi de circuits à large bande, auxquels sont
associés des circuits réjecteurs. Ces réjecteurs éliminent la FI son du canal
vision, ainsi que d’autres fréquences pouvant interférer avec la FI
vision(canaux adjacents notamment).
Tous ces circuits
permettent d’obtenir une courbe de réponse globale de l’amplificateur FI vision
telle que représenté (figure 8) .
{kind=link}
C) Amplificateurs
FI vision en standard français à transistors
La (figure 9) représente le schéma synoptique d’un
amplificateur FI vision à trois étages. On trouve également des amplificateurs
FI à deux étages.
{kind=link}
En examinant le
synoptique de la figure 9 , on voit que chaque étage comporte différents
circuits de mise en forme et de réjection associés au transistor amplificateur.
Sur le 1er
étage, un réjecteur centré sur 39, 2 MHz assure une grande atténuation de la
porteuse son. Un autre réjecteur centré sur 41,25 MHz élimine le son du canal 2
VHF (éventuellement capté).
On trouve dans le
deuxième étage, un réjecteur son du canal adjacent centré sur 26,05 MHz ainsi
qu’un réjecteur son 39,2 MHz.
On trouve dans le
troisième étage, deux réjecteurs son 39,2 MHz éliminant ce qui pourrait rester
de la porteuse son.
On remarquera que
chaque étage possède un ou plusieurs circuits de mise en forme qui modèlent
chacun une partie de la courbe de réponse globale de l’amplificateur FI vision.
D’autre part, il
faut avoir une tension d’environ 2 V crête après détection vision, ce qui
nécessite un gain de l’amplificateur FI vision compris entre 60 et 80 dB.
En standard 625
lignes, la largeur de la bande passante est réduite(bande étroite), c’est un
circuit de mise en forme FI faisant partie de l’ensemble VHF qui effectue cette
opération.
L’impédance d’entrée
d’un transistor monté en émetteur commun est de l’ordre du kiloohm. Cette
caractéristique impose une adaptation d’impédance des circuits de couplage
inter étages. En effet, il faut transférer le maximum de puissance à la base du
transistor suivant, tout en amortissant au minimum le circuit accordé. De plus,
il faut tenir compte des variations des caractéristiques d’entrées des
transistors soumis à l’action du CAG FI.
1) Gain d’un
étage FI ayant un circuit LC parallèle accordé
Considérons le
schéma de la (figure 10) , un transistor monté en
émetteur commun a comme charge de collecteur un circuit parallèle LC.
{kind=link}
Le gain d’un montage
en émetteur commun est défini par la relation
G = ![]() , nous aurons donc G =
, nous aurons donc G = ![]() Z étant l’impédance du circuit
Z étant l’impédance du circuit
LC.
A la fréquence de
résonance, la charge de collecteur à une impédance Zo maximale.
Nous aurons donc un
gain maximum à cette fréquence Fo. Pour toutes les fréquences différentes de
Fo, l’impédance Z de la charge est plus faible que l’on s’éloigne de Fo.
Le gain de
l’amplificateur diminuera donc pour les fréquences s’éloignant de Fo.
2) Circuits de
couplages assurant la liaison entre étages FI vision
a) circuits
simples décalés
La (figure
11) représente deux systèmes de couplage simple.
{kind=link}
A la (figure 11 a) , nous avons un couplage inductif.
A la (figure 11 b) , il s’agit d’un couplage capacitif.
Dans les deux cas,
nous voyons que le circuit est accordé par le noyau plongeur de la bobine L.
Avec ce système,
chaque étage est centré sur une fréquence et la courbe de réponse globale de
l’amplificateur FI a une forme qui est la somme des courbes de réponse de
chaque étage comme le montre la (figure 12) .
{kind=link}
L’allure de cette
courbe sera, bien entendu, quelque peu modifié par les réjecteurs
indispensables pour éliminer les fréquences indésirables.
b) Circuits
doubles ou encore appelés filtres de bande.
Ils sont composés de
deux circuits semblables, accordés sur la même fréquence. La (figure
13) représente un tel montage.
{kind=link}
Les deux circuits
sont accordés par un noyau réglable dans chaque bobine.
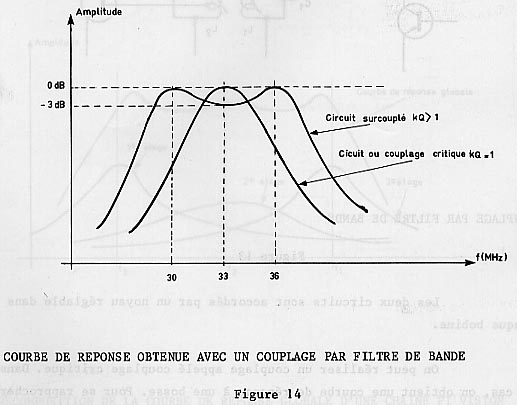
On peut réaliser un
couplage appelé couplage critique. Dans ce cas, on obtient une courbe de
réponse à une bosse. Pour se rapprocher le plus possible du gabarit idéal de la
courbe de réponse d’un amplificateur FI vision, il est nécessaire de réaliser
un couplage plus serré. La courbe de réponse des circuits surcouplés présente
alors deux bosses.
La (figure
14) représente les courbes de réponse obtenues avec des circuits au
couplage critique et des circuits surcouplés.
{kind=link}
Les circuits
surcouplés sont généralement réglés de telle sorte qu’une bosse se trouve
centrée aux alentours de 30 MHz et l’autre bosse vers 36 MHz. Le creux est
centré sur 33 MHz à – 3 dB.
Notons enfin que le
couplage peut être obtenu par un condensateur C![]() .
.
Avec ce genre de
couplage, les deux bobines sont placées dans un blindage séparé.
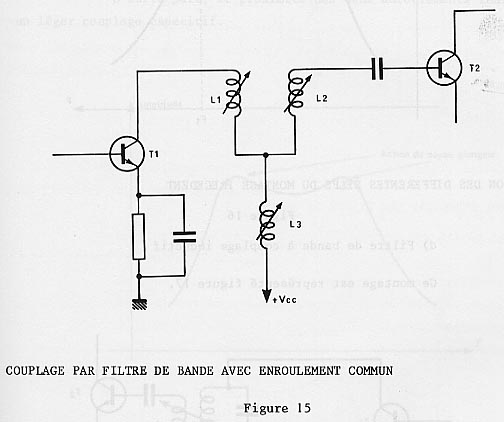
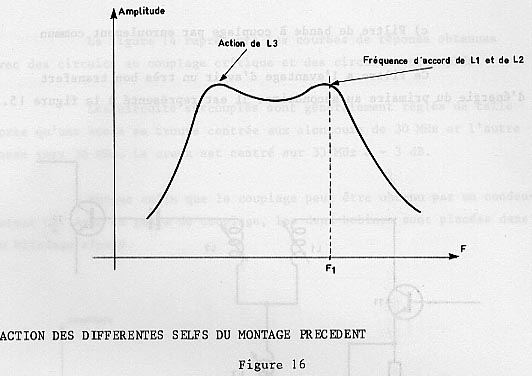
c) Filtre de
bande à couplage par enroulement commun
Ce filtrage a
l’avantage d’avoir un très bon transfert d’énergie du primaire au secondaire.
Il est représenté à la (figure 15) .
{kind=link}
La bobine L1 accorde
le circuit primaire et la bobine L2 accorde le circuit secondaire. On accorde
ces deux circuits sur la même fréquence située dans le haut de la bande.
La bobine L3 fait
varier le couplage et agit également sur la bosse des fréquences basses. La (figure 16) montre l’action de ces bobines.
{kind=link}
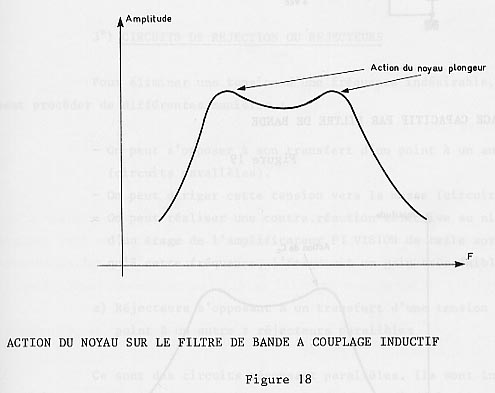
d) Filtre de
bande à couplage inductif
Ce montage
représenté (figure 17) . C’est un transformateur où le
couplage magnétique, entre primaire et secondaire, est ajustable par le noyau
réglable. Dans ce montage, le degré de couplage agit simultanément sur les deux
bosses comme indiqué (figure 18) . D’autre part, la
proximité des deux enroulements réalise un léger couplage capacitif.
{kind=link}
{kind=link}
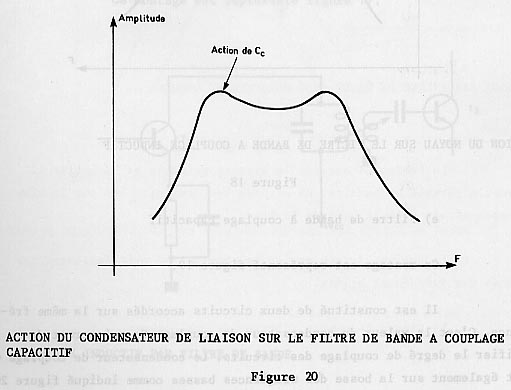
e) Filtre de
bande à couplage capacitif
Ce montage est
représenté (figure 19) . Il est constitué de deux
circuits accordés sur la même fréquence. C’est la valeur du condensateur de
couplage C![]() qui permet de modifier le degré de couplage
des circuits. Le condensateur de couplage C
qui permet de modifier le degré de couplage
des circuits. Le condensateur de couplage C![]() agit également sur la bosse des fréquences basses comme indiqué (figure 20) .
agit également sur la bosse des fréquences basses comme indiqué (figure 20) .
{kind=link}
{kind=link}
3) Circuits de
réjection ou réjecteurs
Pour éliminer une tension
d’une fréquence indésirable, on peut procéder de différentes manières :
![]() On s’oppose à son transfert d’un point à un autre (circuits
parallèles).
On s’oppose à son transfert d’un point à un autre (circuits
parallèles).
![]() On peut diriger cette tension vers la masse (circuits série).
On peut diriger cette tension vers la masse (circuits série).
![]() On peut réaliser une contre réaction sélective au niveau d’un étage de l’amplificateur FI vision de
telle sorte qu’à cette fréquence, l’étage ait un gain très faible.
On peut réaliser une contre réaction sélective au niveau d’un étage de l’amplificateur FI vision de
telle sorte qu’à cette fréquence, l’étage ait un gain très faible.
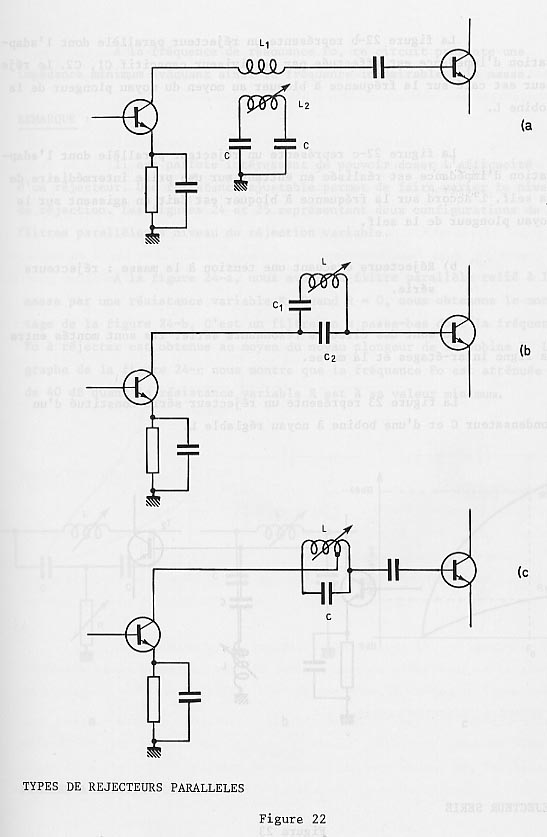
a) Réjecteurs
s’opposant à un transfert d’une tension d’un point à un autre : réjecteurs
parallèles
Ce sont des circuits
résonants parallèles. Ils sont insérés en série entre deux étages. Ils bloquent
la fréquence indésirable sur laquelle ils sont calés.
La (figure
21) représente le schéma type d’un circuit résonant parallèle. Le noyau de
la bobine L permet de centrer la fréquence de résonance du circuit sur la
fréquence à bloquer.
{kind=link}
A la fréquence Fo,
ce circuit présente une impédance maximum ainsi, la tension V![]() présente en S se trouvera très atténuée par rapport à V
présente en S se trouvera très atténuée par rapport à V![]() présente à l’entrée E du réjecteur.
présente à l’entrée E du réjecteur.
Dans les montages à
transistors, ce genre de montage n’est pas utilisé ainsi, car les faibles
impédances des circuits dues justement à ces transistors nécessitent une
adaptation d’impédance des réjecteurs afin qu’ils ne soient pas amortis, ce qui
les rendraient inefficace.
La (figure
22) représente différents montages de réjecteurs parallèles adaptés.
{kind=link}
La (figure
22a) représente un réjecteur parallèle constitué d’un transformateur dont
le secondaire est accordé sur la fréquence à bloquer à l’aide du noyau plongeur
de la bobine L2. A la fréquence de résonance Fo, l’impédance du secondaire est
maximale et, comme dans tout transformateur, les caractéristiques du secondaire
sont ramenées au primaire.
Ainsi, la fréquence
indésirable est atténuée par la bobine L1 qui présente une impédance maximale
pour cette fréquence.
La (figure
22b) représente un réjecteur parallèle dont l’adaptation d’impédance est
effectuée par le diviseur capacitif C1, C2. Le réjecteur est calé sur la
fréquence à bloquer au moyen du noyau plongeur de la bobine L.
La (figure
22c) représente un réjecteur parallèle dont l’adaptation d’impédance
est réalisée en entrant sur une prise intermédiaire de la self. L’accord sur la
fréquence à bloquer est fait en agissant sur le noyau plongeur de la self.
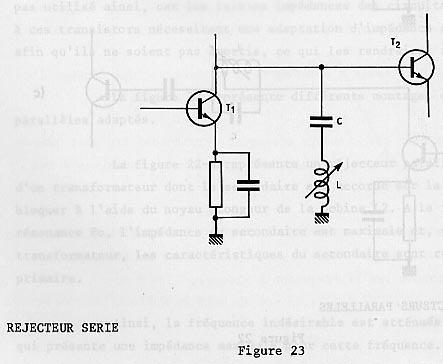
b) Réjecteurs
évacuant une tension à la masse : réjecteurs série
Ce sont des circuits
résonants série. Il sont montés entre la ligne inter étages et la masse.
La (figure
23) représente un réjecteur série constitué d’un condensateur C et
d’une bobine à noyau réglable L. A la fréquence de résonance Fo, ce circuit présente
une impédance minimum évacuant ainsi la fréquence indésirable à la masse.
{kind=link}
Il est parfois
intéressant de pouvoir doser l’efficacité d’un réjecteur. Une résistance
ajustable permet de faire varier le niveau de réjection. Nous allons voir deux
configurations de filtres parallèles à niveau de réjection variable :
A la (figure 24a) , nous avons un filtre parallèle relié à la
masse par une résistance variable R. Quand R = 0, nous obtenons le montage de
la (figure 24b) . C’est un filtre en ![]() passe bas dont la fréquence Fo à réjecter est
obtenue au moyen du noyau plongeur de la bobine L. Le graphe de la (figure 24c) nous montre que la fréquence Fo est
atténuée de 40 dB quand la résistance variable R est à sa valeur minimum. Pour
la valeur maximum de R, le niveau de réjection à Fo est beaucoup moins
important. Entre ces deux positions extrêmes de R, on obtient des niveaux de
réjection intermédiaires.
passe bas dont la fréquence Fo à réjecter est
obtenue au moyen du noyau plongeur de la bobine L. Le graphe de la (figure 24c) nous montre que la fréquence Fo est
atténuée de 40 dB quand la résistance variable R est à sa valeur minimum. Pour
la valeur maximum de R, le niveau de réjection à Fo est beaucoup moins
important. Entre ces deux positions extrêmes de R, on obtient des niveaux de
réjection intermédiaires.
{kind=link}
La (figure
25a) représente un réjecteur parallèle dont le point froid est la
prise médiane de la bobine L. Le graphe de la
(figure 25c) montre le niveau de réjection
obtenu en fonction de la valeur de la résistance variable R. Pour R = 0, nous
avons un filtre en ![]() passe haut comme représenté à la (figure 25b) et le maximum de réjection à la fréquence Fo.
Nous constatons que le niveau varie en fonction de la valeur de la résistance
R . Ce niveau est minimum pour une valeur une de R maximum.
passe haut comme représenté à la (figure 25b) et le maximum de réjection à la fréquence Fo.
Nous constatons que le niveau varie en fonction de la valeur de la résistance
R . Ce niveau est minimum pour une valeur une de R maximum.
{kind=link}
c) Réjecteurs par
contre réaction
La (figure
26) représente le schéma type d’un tel réjecteur. La bobine L2 constitue
avec le condensateur C un circuit parallèle accordé. La bobine L2 est couplée
magnétiquement à la bobine L1 insérée dans le circuit d’émetteur du transistor
TR.
{kind=link}
A la fréquence de
résonance, le circuit L2 – C présente une impédance maximum qui est ramenée
dans le circuit d’émetteur et le gain du montage G = ![]() sera faible. L’atténuation de la fréquence
indésirable sera obtenue par une très faible amplification de celle-ci (contre
réaction sélective), par rapport aux autres fréquences qui seront beaucoup plus
amplifiées (la contre réaction ne jouant plus pour toutes les fréquences différentes
de celle sur laquelle le circuit L2-C est accordé).
sera faible. L’atténuation de la fréquence
indésirable sera obtenue par une très faible amplification de celle-ci (contre
réaction sélective), par rapport aux autres fréquences qui seront beaucoup plus
amplifiées (la contre réaction ne jouant plus pour toutes les fréquences différentes
de celle sur laquelle le circuit L2-C est accordé).
4) La commande
automatique de gain ( CAG)
En dehors d’action
manuelle sur la commande de contraste, la tension moyenne en sortie de la
détection vidéo doit être constante pour une image fixe (une mire par exemple).
Or, le niveau du
signal reçu par l’antenne varie énormément en fonction des conditions de
propagation surtout si celle-ci est éloignée de l’émetteur.
Il est donc
indispensable qu’un système compense ces écarts de niveau.
Le gain de certains
étages amplificateurs entre l’ antenne et la détection devra varier en sens
inverse des variations d’amplitude du signal reçu.
Si le signal reçu
par l’antenne augmente, le gain des amplificateurs commandés devra diminuer et
inversement.
C’est la commande
automatique de gain ou CAG qui assure cette fonction. On l’appelle également
contrôle automatique de gain ou CAG . Un étage, généralement le premier, de
l’amplificateur FI vision est soumis à l’action de la CAG . C’est la CAG FI
vision.
L’amplificateur VHF
et l’amplificateur UHF sont soumis également à l’action de la CAG . C’est la
CAG HF.
Nous examinerons
d’abord la CAG Fi vision, puis nous verrons les CAG HF ( VHF et UHF).
a) Action d’une
variation de polarisation sur le gain d’un amplificateur
La (figure
27) représente le graphe G = f (I![]() ) ,
c'est-à-dire le gain en fonction du courant collecteur d’un transistor utilisé
en FI ou en HF.
) ,
c'est-à-dire le gain en fonction du courant collecteur d’un transistor utilisé
en FI ou en HF.
{kind=link}
Nous voyons que le
gain d’un transistor varie en fonction du courant collecteur I![]() ,
donc du courant de base.
,
donc du courant de base.
Considérons la
première partie de la courbe située à gauche du point M. nous constatons que
pour une augmentation du courant I![]() ,
le gain augmente jusqu’à un maximum situé autour du point M.
,
le gain augmente jusqu’à un maximum situé autour du point M.
Si l’on continue à faire
croître le courant I![]() au-delà du point M, le gain va diminuer.
au-delà du point M, le gain va diminuer.
On voit tout de
suite l’intérêt d’un tel comportement. En effet, si l’on désire faire varier le
gain d’un transistor, il suffira de fixer le point de fonctionnement sur l’une
ou l’autre flanc de la courbe, et en faisant varier le courant I![]() ,
I
,
I![]() variera donc le gain variera.
variera donc le gain variera.
On exploitera cette
propriété dans les amplificateurs FI et HF soumis à l’action de la CAG .
b) CAG inverse
Si l’on fixe le
point de fonctionnement du transistor au point A, nous obtenons un gain G1 pour
un courant collecteur Ic1 .
On voit sur la (figure 27) que si le courant collecteur augmente, le gain
augmente. Pour faire diminuer le gain, il faudra diminuer Ic . Pour des
variations du courant collecteur autour de Ic1, le gain évaluera donc autour de
G1.
On appelle la CAG
inverse lorsque l’on travaille dans cette première partie de la courbe.
On voit que la pente
de la courbe sur ce flanc est relativement raide.
Les variations de courant
Ic donc I![]() auront une action énergique sur le gain.
auront une action énergique sur le gain.
La consommation d’un
transistor commandé en CAG inverse est faible et une augmentation de la
puissance reçue se traduira par une diminution du courant Ic.
Ce système sera donc bien adapté pour les récepteurs radio fonctionnant sur piles où une consommation minimale est recherchée.
Par contre, une
diminution du courant Ic lors d’une augmentation importante du signal reçu a
tendance à porter le transistor en classe C. Le signal vidéo serait alors
écrêté. La commande en CAG inverse est donc peu employée pour les
amplificateurs FI vidéo ou la qualité du signal transmis est primordial.
c) CAG directe
Le point de
fonctionnement d’un transistor commandé en CAG directe sera fixé sur le flanc
droit de la courbe (figure 27) par exemple au point B .
Pour un courant collecteur Ic2, nous aurons un gain G2. On constate ici que
pour diminuer le gain, il faut augmenter Ic , le gain augmentera si Ic diminue.
Pour des variations
du courant collecteur autour de Ic2, le gain évoluera autour de G2.
La commande d’un
transistor par CAG directe sera moins énergique qu’une commande par CAG
inverse, car le flanc droit de la courbe de réponse (figure
27) est moins raide que le flanc gauche. Aussi l’action d’une CAG directe
sera renforcée par un amplificateur de CAG .
Par contre, cette
pente plus faible réduit énormément le risque de voir l’amplificateur se
saturer sur les forts signaux.
En télévision, on
emploiera donc souvent une CAG directe. Le fait d’avoir une consommation plus
élevée par rapport à une CAG inverse importe peu, les téléviseurs étant
alimentés en général sur le secteur.
Pour obtenir la
tension de CAG , il existe deux systèmes :
![]() La CAG à intégration qui prend en compte la totalité du signal vidéo.
La CAG à intégration qui prend en compte la totalité du signal vidéo.
![]() La CAG selon le niveau du noir.
La CAG selon le niveau du noir.
d) CAG à
intégration
La (figure
28) représente le schéma type d’une CAG à intégration. La diode D redresse
le signal vidéo, venant de la détection qui est appliquée sur sa cathode. On
retrouvera sur son anode une tension d’autant plus négative que l’amplitude du
signal vidéo sera grande. Cette tension est appliquée sur la base du transistor
NPN T1.
{kind=link}
Le collecteur du
transistor T1 est raccordé à la base du transistor T2. La tension de CAG est
disponible sur le collecteur de T2.
Supposons une
augmentation du niveau de signal reçu par l’antenne. L’amplitude du signal
vidéo détecté, donc présent sur la cathode de la diode D, augmente.
La valeur de la
tension négative présente sur l’anode de la diode D et appliquée sur la base de
T1 augmente. Ce transistor NPN conduit moins, son collecteur donc la base du
transistor T2, devient plus positive. Le transistor T2 conduit moins, son
collecteur devient donc moins positif et son émetteur plus positif, ceci pour
s’énoncer en disant que VC1 diminue et VC2 augmente.
Nous avons ainsi un
montage qui produit deux tensions continues dont les valeurs varient en sens
contraire mais proportionnellement aux fluctuations du niveau HF reçu par
l’antenne. Il est donc possible de commander avec les tensions VC1 et VC2, la
polarisation d’un ou plusieurs amplificateurs FI et HF afin d’ajuster leur gain
en fonction du niveau reçu par l’antenne.
Par exemple, un
amplificateur FI équipé de transistor NPN peut être commandé en CAG directe par
la tension VC2 alors que la tension VC1 peut commander en CAG directe, un tuner
HF équipé de transistors PNP . La résistance ajustable P permet de régler le seuil
d’action de cet amplificateur de CAG .
Ce système
fonctionne parfaitement mais il présente un inconvénient. Considérons une
émission reçue à un niveau rigoureusement constant.
Lorsque le contenu
de l’image varie dans de grandes proportions, par exemple dans le cas de
séquences sombres succédant à des passages très lumineux, le niveau de la vidéo
varie également beaucoup, ainsi que les tensions VC1 et VC2 qui commandent le
gain des amplificateurs FI et HF.
Une séquence sombre
d’une durée relativement longue sera interprétée comme une diminution du signal
reçu par l’antenne et le gain des amplificateurs FI et HF augmentera. Ainsi, la
scène analysée par la caméra à l’émission ne sera pas reproduite fidèlement.
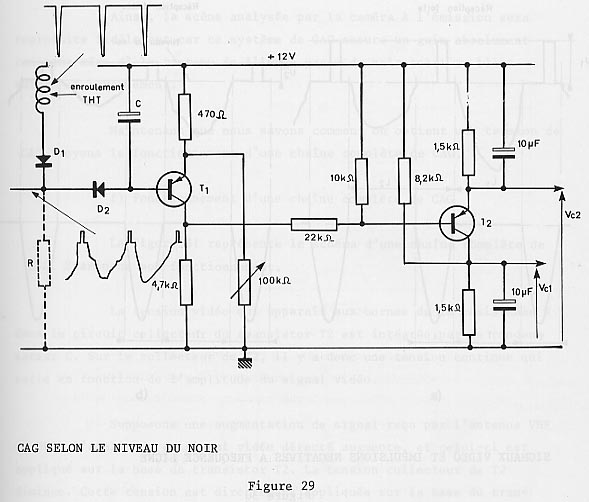
e) CAG selon le
niveau du noir
Considérons le
schéma de la (figure 29) qui représente une CAG selon le
niveau du noir. Le signal vidéo, présent aux bornes de la résistance R qui est
la matérialisation de l’étage précédent (détection ou préamplification vidéo),
est appliquée aux cathodes des diodes D1 et D2.
{kind=link}
La diode D1 étant
polarisée dans le sens direct est passante, elle court circuite le signal vidéo
sauf lorsqu’une impulsion négative de retour ligne lui est appliquée sur son
anode laquelle est reliée à un enroulement secondaire du transformateur THT.
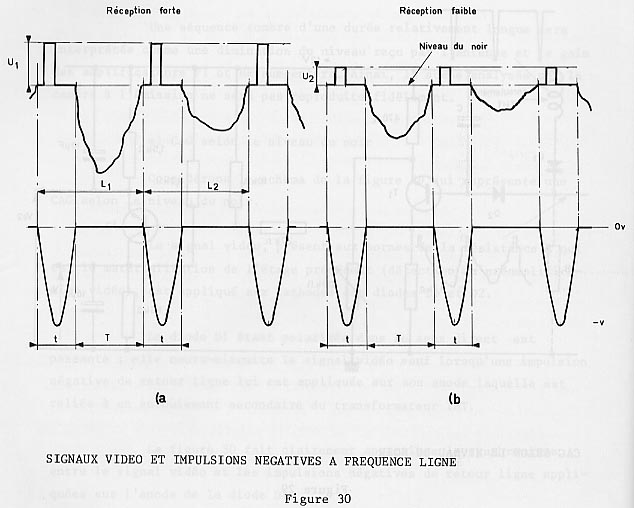
La (figure
30) fait clairement apparaître le synchronisme entre le signal vidéo et les
impulsions négatives de retour ligne appliquées sur l’anode de la diode D1.
{kind=link}
Au temps t, un
impulsion négative apparaît sur l’anode de la diode D1 qui se bloque. La
tension présente aux bornes de R n’est plus mise à la masse par D1, elle est
détectée par le diode D2 et le condensateur C qui délivrent une tension
continue appliquée à la base du transistor T1 (figure 29)
.
Toute variation de
la tension de base de T1, engendrera une variation de la conduction de ce
transistor et de ce fait, une variation de la chute de tension dans la
résistance de collecteur de T1. La tension de base de T2 subira ces mêmes
variations puisqu’elle est reliée à travers une résistance de 22 k![]() au
collecteur de T1.
au
collecteur de T1.
Ainsi les tensions
VC1 et VC2 seront directement fonction de l’amplitude des tops de synchronisation
indépendamment du contenu de l’image. En effet, la tension appliquée à la base
de T1 est parfaitement déterminée comme le montre la (figure
30) . Elle est fonction de l’amplitude des tops de synchronisation ligne et
cette amplitude est toujours la même à l’émission.
Considérons la (figure 30a) , nous voyons que la tension vidéo proprement
dite a varié de la ligne L1 à la ligne L2 du fait d’un changement du contenu de
l’image. Par contre, l’amplitude des tops lignes n’a pas changé. Le
condensateur C reçoit donc à chaque temps t une tension invariable pour un même
niveau de réception.
A la (figure 30b) , nous constatons que le niveau de réception a
diminué : l’amplitude des tops est plus faible.
Aux temps t, la base
du transistor T1 recevra une tension moins négative, donc T1 conduira moins et
ce, quel que soit le contenu de l’image.
Nous voyons donc que
les tensions VC1 et VC2 qui commandent le gain des étages FI et HF dépendent
uniquement de la profondeur des tops lignes par rapport au niveau du noir. A la
(figure 30a) , la réception est forte, à la (figure 30b) , la réception est faible. La tension U![]() est supérieure à la tension U
est supérieure à la tension U![]() .
Les tensions de CAG seront uniquement fonction de l’amplitude des tops ligne
donc du niveau de réception.
.
Les tensions de CAG seront uniquement fonction de l’amplitude des tops ligne
donc du niveau de réception.
Ainsi, la scène
analysée par la caméra à l’émission sera reproduite fidèlement car le système
de CAG assure un gain absolument constant même si le contenu de l’image passe
du noir total au blanc saturé et inversement.
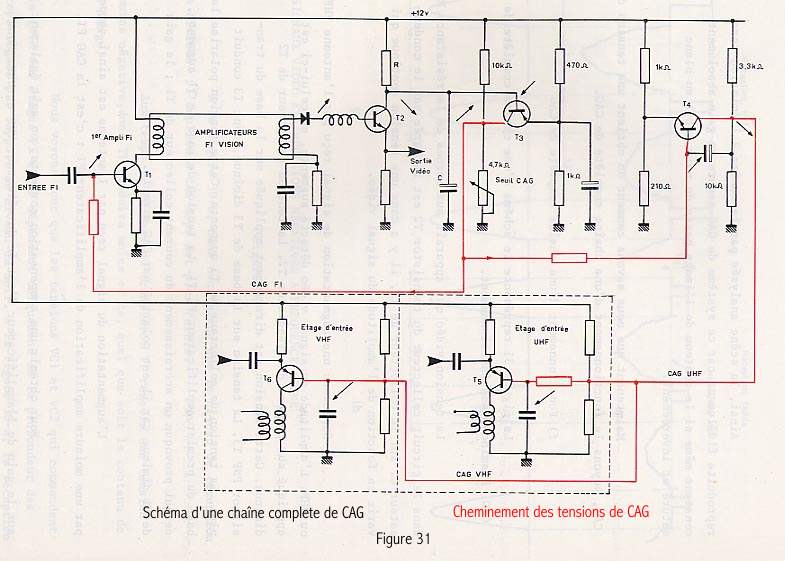
f) fonctionnement
d’une chaîne complète de CAG
La (figure
31) représente le schéma d’une chaîne complète de CAG .
{kind=link}
La tension vidéo qui
apparaît aux bornes de la résistance R dans le circuit collecteur du transistor
T2 est intégrée par le condensateur C. sur le collecteur de T2, il y a donc une
tension continue qui varie en fonction de l’amplitude du signal vidéo.
Supposons une
augmentation du signal reçu par l’antenne VHF ou UHF. L’amplitude du signal
vidéo détecté augmente, et celui-ci est appliqué sur la base du transistor T2.
La tension collecteur de T2 diminue, cette tension est directement appliquée
sur la base du transistor PNP T3. La tension sur la base de T3 diminue, donc T3
conduit plus. La tension de collecteur de T3 augmente, cette tension polarise
la base du premier amplificateur FI T1. La tension de base de T1 augmente, ce
qui provoque un accroissement du courant collecteur de T1, le gain de T1
diminue car il est polarisé par CAG directe.
L’augmentation du
signal reçu par l’antenne est ainsi compensée par une moindre amplification de
l’amplificateur FI : c’est la CAG FI.
Pour obtenir une
compensation correcte, on agit également sur le gain de l’amplificateur
d’entrée du sélecteur VHF et UHF. Nous avons vu plus haut que la tension
collecteur de T3 augmente lorsque le signal reçu par l’antenne augmente.
La tension de
collecteur de T3 est appliquée sur la base du transistor T4. La tension de base
de T4 augmente donc T4 conduit plus. La tension de collecteur de T4 diminue.
Cette tension est appliquée sur la base du transistor T5 et T6 amplificateurs
d’entrée. Ce sont des transistors PNP montés en base commune.
Soit le sélecteur UHF
en service : la tension de base du transistor T5 diminue donc son courant
de collecteur augmente, le gain de T5 diminue car il est soumis à une CAG
directe.
L’étage d’entrée du
sélecteur VHF a bien sur, le même comportement. Ceci est la CAG HF.
Il y a donc deux
compensations : l’une au niveau de l’amplificateur FI, l’autre au niveau
des amplificateurs d’entrée VHF et UHF.
Dans le cas où le
signal à l’antenne diminue, la boucle de CAG réagit en sens inverse de telle
sorte que cette diminution soit compensée par une augmentation du gain des
amplificateurs soumis à la CAG . Ainsi le signal vidéo appliqué au cathoscope
reste indépendant des variations de niveau reçu par l’antenne.
Il convient de
pouvoir régler la polarisation des amplificateurs soumis à la CAG afin, d’une
part, de positionner le point de fonctionnement des transistors et, d’autre
part, d’adapter l’action de la CAG compte tenu du niveau moyen reçu par
l’antenne qui est fonction du lieu d’utilisation du téléviseur par rapport à
l’émetteur capté.
Ce réglage
s’effectue au moyen de la résistance variable de 4,7 k![]() (seuil
CAG) aux bornes de laquelle se développe la tension de CAG FI.
(seuil
CAG) aux bornes de laquelle se développe la tension de CAG FI.
D’autre part,
l’action de la CAG HF ne doit pas faire descendre le gain des étages d’entrées
des sélecteurs VHF et UHF au dessous d’un certain seuil car le rapport signal /
bruit deviendrait trop important.
Enfin, il est
nécessaire de temporiser l’action de la CAG (CAG retardée). En effet, lors
d’une action sur le clavier pour changer de programme, il s’écoule un certain
temps pendant lequel il n’y a plus de signal détecté.
Le condensateur
électrochimique entre la base et le collecteur de T4 s’oppose aux variations
rapides de la tension de CAG HF qui peuvent également survenir lors de brèves
interruptions d’émissions.
Nous venons
d’examiner le fonctionnement d’une chaîne de CAG commandant les étages UHF et
VHF dont les transistors sont de mêmes polarités. Or, on rencontre des
appareils ayant un étage amplificateur d’entrée UHF NPN et VHF PNP ou
l’inverse.
g) Fonctionnement d’une chaîne de CAG commandant des étages amplificateurs d’entrée HF de
polarités différentes
La (figure
32) représente le schéma d’un tel montage. Supposons une augmentation de
signal reçu par l’antenne. L’amplitude de la tension vidéo augmente, la tension
de base de T2 augmente et sa tension de collecteur diminue. La tension de base
du transistor T3 diminue et sa tension de collecteur augmente. La tension de
base du transistor T1 amplificateur FI soumis à la CAG augmente. Le courant de
collecteur de T1 augmente, donc son gain diminue. Le transistor T1 va fournir
les tensions de commande des CAG UHF et VHF.
{kind=link}
Voyons la CAG UHF
qui commande un transistor PNP .
La tension de base
du transistor T1 augmente, donc sa tension d’émetteur également.
La tension de base
du transistor T4 augmente donc sa tension de collecteur diminue.
La tension de base
du transistor T5, amplificateur d’entrée UHF, diminue. Son courant de collecteur
augmente, donc son gain diminue puisqu’il fonctionne en CAG direct.
Voyons maintenant la
CAG VHF qui commande un transistor NPN .
La tension de base
du transistor T1 augmente donc sa tension de collecteur diminue. La tension de
base du transistor T6 diminue donc sa tension de collecteur augmente. La
tension de base du transistor T7 augmente donc son courant de collecteur
augmente. Le gain du transistor T7 amplificateur d’entrée VHF diminue, car il
est commandé en CAG direct.
D’autre part, nous
remarquerons que ce montage permet d’ajuster indépendamment l’un de l’autre, la
CAG UHF et la CAG VHF.
h) CAG à
atténuateur à diodes PIN
Contrairement aux
systèmes de CAG décrits précédemment qui réduisaient plus ou moins le gain des
amplificateurs qu’ils commandent, la CAG que nous allons examiner détermine
l’atténuation d’un système à diodes PIN. Cet atténuateur, placé dans les
circuits HF, laisse passer plus ou moins vers les étages suivants du tuner, le
signal arrivant de l’antenne.
La (figure
33) représente le schéma synoptique d’un amplificateur FI vision dont la
CAG agit sur un atténuateur à diodes PIN. Cet exemple de disposition de
l’atténuateur dans la chaîne d’amplification n’est pas rigoureuse.
{kind=link}
L’atténuateur à
diodes PIN peut être disposé après l’amplificateur UHF ou VHF. Il peut
également se trouver en amont ou en aval de l’amplificateur FI vision ou être
inséré dans cet amplificateur. Jusqu’ici, nous avons considéré l’emplacement
d’un atténuateur à diodes PIN mais on peut très bien en trouver plusieurs dans
la chaîne d’amplification.
5) Etude
d’amplificateurs FI vision à transistors
a) Etude de
l’amplificateur Fi vision d’un téléviseur SONOLOR
Voir (figure 34) . Nous allons d’abord considérer la chaîne
d’amplification du signal FI, puis nous verrons le fonctionnement de la CAG .
{kind=link}
Le transistor T1 est
le premier étage de l’amplificateur. C’est un NPN monté en émetteur commun. Il
reçoit sur sa base au travers du condensateur C1, le signal FI image et son
issu des sélecteurs VHF et UHF.
Nous trouvons dans
son circuit collecteur, quatre circuits accordés.
![]() Le circuit S1 réalise deux fonctions vis-à-vis de l’amplificateur FI
vision : c’est un réjecteur son réglé sur 39,2 MHz. Ce circuit S1 réalise
également l’extraction de la porteuse son qui est dirigée vers l’amplificateur
FI son.
Le circuit S1 réalise deux fonctions vis-à-vis de l’amplificateur FI
vision : c’est un réjecteur son réglé sur 39,2 MHz. Ce circuit S1 réalise
également l’extraction de la porteuse son qui est dirigée vers l’amplificateur
FI son.
![]() Le circuit S3 est un réjecteur série qui, réglé sur la fréquence 26,05
MHz, élimine le son du canal adjacent.
Le circuit S3 est un réjecteur série qui, réglé sur la fréquence 26,05
MHz, élimine le son du canal adjacent.
![]() Le circuit S4 est un réjecteur série qui, accordé sur 41,25 MHz,
élimine le son du canal 2 VHF.
Le circuit S4 est un réjecteur série qui, accordé sur 41,25 MHz,
élimine le son du canal 2 VHF.
![]() Enfin, le circuit S2 qui assure une première mise en forme de la courbe
FI vision.
Enfin, le circuit S2 qui assure une première mise en forme de la courbe
FI vision.
Sur la base du
transistor T2 est présente la porteuse FI vision amplifiée par le premier
étage. Ce transistor T2 constitue l’élément amplificateur du deuxième étage FI
vision. C’est un NPN monté en émetteur commun. Cet étage a un gain d’environ 20
décibels de même que le premier étage. Nous rencontrons dans son circuit
collecteur, un réjecteur son ajustable centré sur 39,2 MHz(S5).
Le transistor T3
monté en base commune, qui fait également partie du second étage amplificateur
FI vision, réalise une adaptation d’impédance entre le circuit réjecteur à
niveau variable qui a une impédance de sortie élevée et le filtre de bande à
couplage sur la base qui a une impédance d’entrée faible.
Ce filtre réalise
une mise en forme de la courbe de réponse FI vision(bobines S8, S9, S10).
Le troisième étage
FI vision est constitué des transistors T4 et T5 et de leurs circuits associés.
Le transistor T4 est
un NPN monté en émetteur commun. Un réjecteur série bobine S14, calé sur 39,2
MHz, élimine ce qui pourrait subsister de la porteuse son dans le circuit
collecteur du transistor T4.
Le transistor T5
monté en basse commune a le même rôle d’adaptateur d’impédance que le
transistor T3. Enfin le filtre de bande constitué des bobines S15, S16, S17 et
S18, assure la mise en forme finale de la courbe de réponse. Ce filtre délivre
un signal de quelques volts crête à crête qui est détecté par la diode D3.
Nous allons voir maintenant le fonctionnement de la chaîne de CAG :
Sur le collecteur du
transistor T11 qui est un étage adaptateur d’impédance vidéo, est présente une
tension rendue continue par C57 dont la valeur est fonction de l’amplitude de
la porteuse vision détectée.
Remarquons d’autre
part, qu’il y a deux transistors FI soumis à la CAG : T1 et T2.
Supposons une
diminution du niveau HF reçu par l’antenne, la tension détectée diminue, la
tension de collecteur du transistor T11 augmente. La tension de base du
transistor T10 augmente, donc la tension de son collecteur diminue. Cette
tension étant la polarisation des transistors T1 et T2, ces deux transistors
voient leur courant collecteur diminuer, donc leur gain augmenter(CAG directe).
Ainsi, la diminution du niveau de réception est compensée au niveau de
l’amplificateur FI par une augmentation de l’amplification des premier et
deuxième étages. Nous remarquerons la résistance variable R51 entre le collecteur
du transistor T10 et la masse. Elle fixe une tension maximale de la
polarisation des transistors soumis à la CAG lors d’une diminution du signal
reçu.
La tension de CAG HF
est délivrée par le transistor T6.
Nous en étions resté
à la diminution de la tension présente sur le collecteur de T10.
Nous voyons donc que
la tension de base du transistor T6 diminue, donc la tension de son collecteur
augmente : c’est la tension de CAG HF. Les transistors des amplificateurs
d’entrée UHF et VHF étant des PNP, leur tension de base augmente, leur courant
de collecteur diminue, donc leur gain augmente (CAG directe). Ainsi, la
diminution de signal reçu par l’antenne est également compensée au niveau VHF
et UHF.
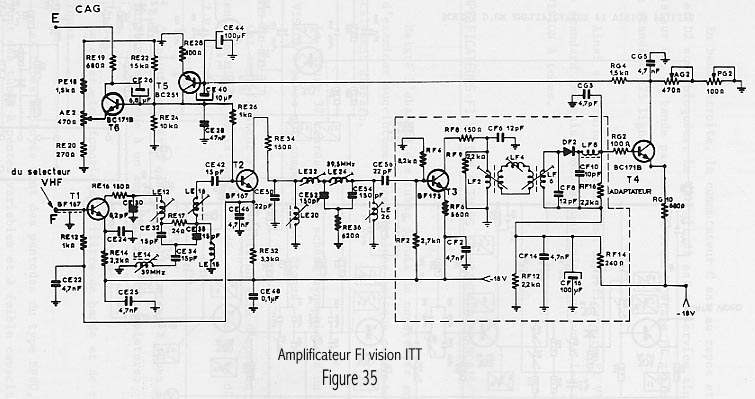
b)Amplificateur
Fi vision d’un téléviseur ITT
Dans le paragraphe
précédent, nous avons vu en détail l’amplificateur FI vision de la figure 34.
Nous explorerons donc rapidement le schéma de la (figure 35)
en nous arrêtant sur ses particularités.
{kind=link}
Nous voyons que cet
amplificateur FI vision est constitué de trois étages comprenant chacun un
transistor NPN monté en émetteur commun. Le transistor T1 reçoit uniquement la
porteuse image, d’où moins de réjecteurs son par rapport au schéma de la figure
34.
Nous remarquerons le
couplage entre le dernier étage FI et la détection vidéo. Deux circuits
surcouplés (LF2 et LF6) modèlent la courbe de réponse.
Nous voyons ,d’autre
part, que les deux premiers étages sont soumis à l’action de la CAG . Mais
c’est le transistor T2 qui agit sur le transistor T1. En effet, lors d’une
variation du courant Ic du transistor T2 due à l’action de la CAG, le potentiel
d’émetteur de ce transistor varie. Et c’est cette tension d’émetteur de T2 qui
polarise le transistor T1. Le transistor T2 sert en quelque sort
d’amplificateur de CAG pour la commande de T1.
c) Amplificateur
FI vision d’un téléviseur Philips
Nous examinerons
uniquement sur cet amplificateur représenté à la (figure36)
, la commutation bande large, bande étroite.
{kind=link}
En bande large, le
commutateur C applique par l’intermédiaire de deux résistances de 18 k![]() ,
une tension positive sur l’anode des diodes D1 et D2 qui sont alors passantes.
Les circuits S3 et S2 sont alors reliés à la masse. La bande passante du
premier étage FI a alors le gabarit du standard 819 lignes.
,
une tension positive sur l’anode des diodes D1 et D2 qui sont alors passantes.
Les circuits S3 et S2 sont alors reliés à la masse. La bande passante du
premier étage FI a alors le gabarit du standard 819 lignes.
En bande étroite, le
commutateur C est au repos et les diodes D1 et D2 sont bloquées. Le circuit S1
est en service ainsi que le condensateur Ce. La bande passante du premier étage
FI a alors le gabarit du standard 625 lignes.
D) Amplificateurs
Fi vision à tubes en standard français
La (figure
37) représente le schéma synoptique d’un amplificateur FI vision à tubes
qui comporte trois étages.
{kind=link}
Cet amplificateur FI
doit avoir un gain d’environ 70 dB afin d’obtenir un niveau de la tension vidéo
en sortie de la détection d’environ 2 V.
On peut considérer
que cet amplificateur à tubes a une structure globale identique à un
amplificateur à transistors.
En effet, les
fonctions de filtre de bande et de réjecteur sont identiques.
Les tubes employés
sont des pentodes du type EF80, EF 183 ou EF 184. Ce sont des tubes à pentes
variables et à faible capacité d’entrée et de sortie.
Les tubes à pentes variables
sont en effet très utiles pour les étages soumis à la CAG qui est ainsi plus
efficace.
Examinons le schéma
de la (figure 38) qui est un amplificateur FI image à
tubes d’un téléviseur Ribet-Desjardins.
{kind=link}
La bobine L1 à noyau
plongeur reçoit en son point milieu, la porteuse FI image. E circuit d’entrée
du premier étage FI dont la bobine L1 fait partie, assure une première mise en
forme de la courbe de réponse.
Un réjecteur
parallèle réglé sur 41,25 MHz (bobine L2) élimine le son du canal 2 VHF
éventuellement capté. Le signal FI vision est appliqué sur la grille de
commande du tube T1 qui l’amplifie une première fois.
La liaison entre le
premier et le deuxième étage est effectuée par le filtre de bande à couplage
par enroulement à la masse. Ce filtre est constitué des bobines L4 et L5. La
bobine L5 modèle la courbe de réponse en bande large. La bobine L4 met en forme
la courbe de réponse globale.
D’autre part, un
réjecteur série(bobine L3) dérive à la masse, la tension à la fréquence de
26,05 MHz (son du canal adjacent).
Un réjecteur
parallèle(bobine L6) bloque la porteuse son. La tension FI est appliquée à la
grille de commande du tube T2 (2ème étage) par un condensateur de
2,2 nF. Le circuit anodique du tube T2 est chargé par le primaire du
transformateur Tr1, transformateur qui assure le couplage entre le deuxième et
le troisième étage FI. Tr1 est un filtre de bande à couplage inductif. Ce
couplage est optimalisé par le condensateur ajustable C. Un réjecteur parallèle
(bobine L7) centré sur 39,2 MHz bloque ce qui pourrait rester de la porteuse
son. Le tube T3(troisième étage reçoit sur sa grille de commande le signal FI
qu’il amplifie. Dans le circuit anodique de ce dernier tube, deux
transformateurs (Tr1 et Tr2) assurent le couplage avec le circuit de détection
vidéo.
Le tube T1 est
soumis à la CAG .La grille de commande du tube T1 est polarisée par la tension
de CAG .
Lors d’une
augmentation du signal reçu, la tension de CAG diminue, donc la tension V![]() du
tube T1 diminue.
du
tube T1 diminue.
Le gain du tube T1
décroît, ainsi, l’augmentation du signal reçu est compensé par la diminution du
gain du premier étage FI vision.
E) Amplificateurs
FI vision en standard français à circuits intégrés
1) Structure
générale des amplificateurs FI vision à circuits intégrés
La structure
classique à trois étages des amplificateurs FI vision qu’ils soient à tubes ou
à transistors disparaît avec les circuits intégrés.
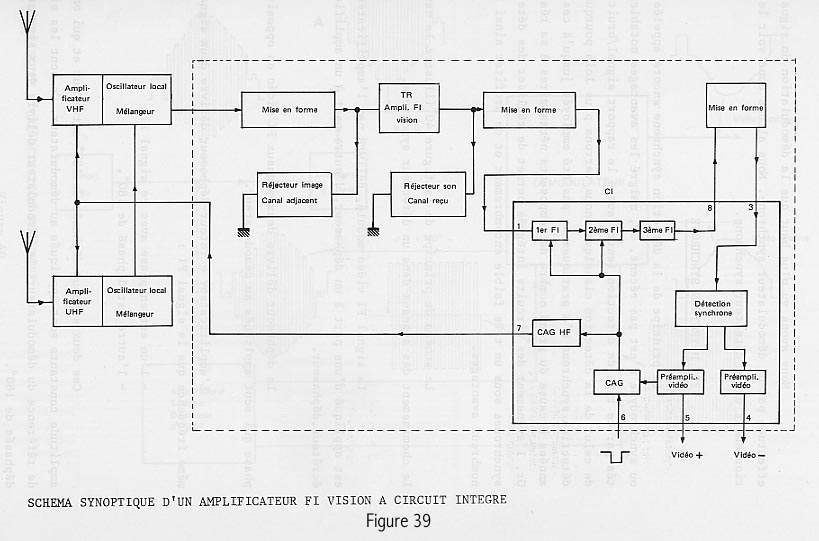
En effet, un circuit
intégré amplificateur FI réalise l’amplification de la tension FI d’une façon
globale, effectue la détection de la vidéo et délivre une tension de CAG HF.
Ceci apparaît clairement sur le schéma synoptique de la (figure
39) que nous allons examiner.
{kind=link}
D’une façon générale,
la tension FI issue des tuners UHF et VHF est appliquée aux circuits de mise en
forme et de réjection afin d’obtenir la courbe de réponse classique en FI
vision. Cette tension FI est ensuite amplifiée d’environ 50 à 60 dB par le
circuit intégré qui la détecte.
La tension FI issue
des tuners UHF et VHF est appliquée à un premier circuit de mise en forme puis
un réjecteur élimine la fréquence image du canal adjacent. Le transistor TR
compense les pertes dues aux circuits de mise en forme. Un deuxième réjecteur
élimine le son du canal reçu. Après
passage dans un second circuit de mise en forme, la tension FI vision
est appliquée au point 1 du circuit intégré qui est l’entrée des amplificateurs
FI intégrés connectés en série. Ces amplificateurs sont construit selon une
structure différentielle ce qui permet d’obtenir un gain important et un
souffle très faible. La tension FI ainsi amplifiée est transmise au détecteur
synchrone par le circuit extérieur de mise en forme connecté au points 8 et 3
du circuit intégré.
Le détecteur délivre
deux signaux vidéo, l’un en lancée positive, l’autre en lancée négatif. Ils
sont tous deux amplifiés par un préamplificateur vidéo et disponibles en sortie
du circuit intégré.
Les deux premiers
amplificateurs intégrés ont généralement leur gain commandé par une tension de
CAG fabriquée par un étage de CAG intégré. C’est toujours une CAG selon le
niveau du noir. Sur le point 6 arrivent les impulsions de retour lignes
calibrées et nécessaires au fonctionnement de la CAG . Un étage CAG à seuil
délivre une tension de CAG qui contrôle le gain des amplificateurs HF des
tuners VHF et UHF.
2) Détection
synchrone
Le principe de la
détection synchrone encore appelée homodyne ou synchrodyne n’est pas récent. Or
malgré les avantages notables présentés par ce type de détection, la détection
synchrone n’a pratiquement pas été employée jusqu’à ces dernières années à
cause du grand nombre de composants nécessaires à sa réalisation. Or,
l’avènement des circuits intégrés permet de réaliser des détecteurs synchrones
sous un très faible encombrement et de profiter ainsi de ses nombreux
avantages.
Le schéma de
principe de la (figure 40) illustre la nature et le
cheminement des signaux dans un détecteur synchrone.
{kind=link}
Le signal FI modulé,
délivré par l’amplificateur FI, est appliqué d’une part à un déphaseur, d’autre
part à un amplificateur écrêteur,
déphaseur.
Le déphaseur délivre
deux signaux FI vidéo en opposition de phase qui sont appliqués au
démodulateur.
L’amplificateur
écrêteur déphaseur délivre deux signaux de même fréquence que le signal
FI :
![]() L’un est en phase avec ce signal FI
L’un est en phase avec ce signal FI
![]() L’autre est déphasé de 180°
L’autre est déphasé de 180°
C’est deux signaux
déphasés de 180° entre eux et qui ont une amplitude constante sont appliqués au
démodulateur. Ce sont les signaux de référence du démodulateur. Le démodulateur
délivre deux signaux vidéo déphasés de 180°.
Voyons maintenant
dans le démodulateur, le traitement de ces signaux. La (figure
41) représente le démodulateur, les signaux qui lui sont appliqués et ceux
qu’il délivre.
{kind=link}
Les transistors TR1,
TR2, TR4 et TR5 fonctionnent en bloqué saturé, ils aiguillent les signaux
délivrés par TR3 et TR6 vers les sorties vidéo positive et vidéo négative.
Les transistors TR1 et
TR5 sont commandés par le signal de référence A et les transistors TR2 et TR4
par le signal de référence B.
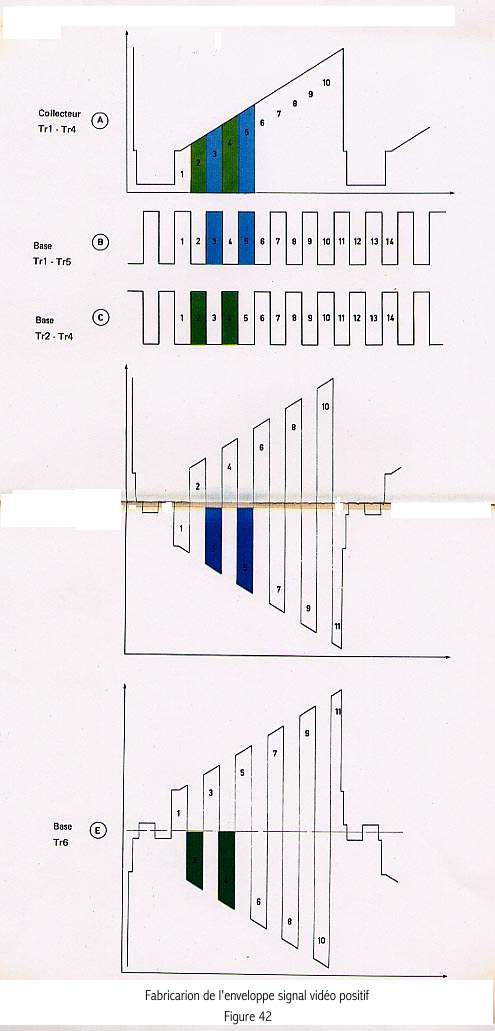
Nous allons voir le
fonctionnement du démodulateur en examinant comment est générée l’enveloppe
positive du signal. L’enveloppe négative est fabriquée selon le même processus.
Considérons la (figure 42) , la demi alternance négative 2 présente sur la
base de TR6 (figure 42 E) est appliquée par son collecteur en lancée
positive sur les émetteurs de TR4 et TR5.
{kind=link}
Au même instant, le
transistor TR4 est rendu conducteur par le signal de référence 2 présent sur sa
base (figure 42 C) .
La demi alternance
négative 2 (figure 42 E) se retrouve donc en lancée
positive sur le collecteur de TR4 (figure 42 A) , c'est-à-dire sur la voie vidéo positive.
Pour la demi
alternance suivante 3, c’est le signal présent sur la base de TR3 qui est
utilisé (figure 42 D) .
La demi alternance 3
présente sur la base de TR3 (figure 42 D) est appliquée
par son collecteur en lancée positive sur les émetteurs de TR1 et TR2.
Dans le même temps,
le transistor TR1 est rendu conducteur par le signal de référence 3 présent sur
sa base (figure 42 B).
La demi alternance
négative 3 (figure 42 D) se retrouve donc en lancée
positive sur le collecteur de TR1 (figure 42 A) ,
c'est-à-dire sur la voie vidéo positive.
On expliquerait de
même les demi alternances suivantes 4, 5, 6 etc. …
La genèse de
l’enveloppe du signal vidéo positif est ainsi réalisée.
La fabrication de
l’enveloppe du signal vidéo négatif sur le collecteur des transistors TR2 et
TR5 est faite de la même façon.
A la lumière de tout
ceci, nous constatons que les deux signaux vidéo délivrés par le démodulateur
synchrone sont définis par le double d’informations par rapport à un signal
vidéo produit par une détection classique.
En conséquence,
trois avantages se dégagent de ce système :
![]() Le rapport signal / bruit deux fois plus élevé que pour un détecteur
classique car l’échantillonnage est fait à chaque alternance.
Le rapport signal / bruit deux fois plus élevé que pour un détecteur
classique car l’échantillonnage est fait à chaque alternance.
![]() L’enveloppe détectée l’est avec une précision beaucoup plus grande que
dans la détection classique et le filtrage de la HF est moins important.
L’enveloppe détectée l’est avec une précision beaucoup plus grande que
dans la détection classique et le filtrage de la HF est moins important.
![]() La réponse en fréquence du démodulateur est très bonne.
La réponse en fréquence du démodulateur est très bonne.
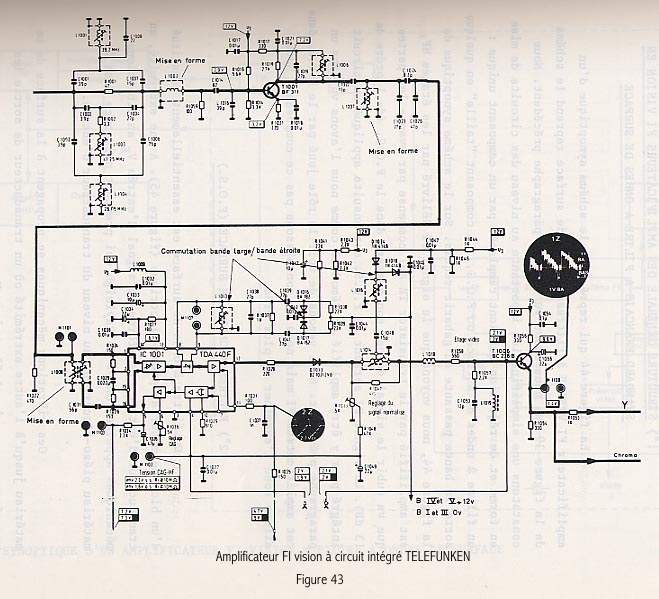
3) Amplificateur
FI vision à circuit intégré
Cet amplificateur
FI, représenté dans la (figure 43) , utilise un circuit
intégré TDA 440. Le signal FI arrive sur la base du transistor BF 311 qui
compense les pertes dues aux différents circuits de mise en forme et de
réjection.
{kind=link}
Le signal FI est
ensuite appliqué au circuit intégré entre les bornes 1 et 16 qui constituent
les entrées des deux premiers amplificateurs FI. Le premier amplificateur FI
est soumis à l’action de la CAG . Le signal FI amplifié est alors transmis au
troisième amplificateur FI auquel est associé un circuit de mise en forme
commutable bande large bande étroite. Ce circuit est connecté aux bornes 8 et 9
du circuit intégré. Le détecteur synchrone délivre deux signaux vidéo, l’un en
lancée positive sur la borne 12, l’autre en lancée négative sur la borne 11.
Le réglage de la CAG
s’effectue en ajustant le potentiomètre relié entre la masse et la borne 6 du
circuit intégré.
La borne 5 délivre
la tension de CAG retardée nécessaire à la commande du gain des étages HF.
D) Amplificateurs
FI vision en standard français à filtre à ondes de surface
1) Structure
générale des amplificateurs FI vision en standard français à filtre à ondes de
surface
La (figure
44) qui représente le schéma synoptique d’un amplificateur FI vision à
filtre à ondes de surface reprend le schéma de la (figure
39) que nous avons vu précédemment. Nous constatons une simplification
importante au niveau des circuits de mise en forme et de réjection qui sont remplacés
par un composant unique : un filtre à ondes de surface ou FOS . Ce
composant « taille » en quelque sorte la bande passante au gabarit
requis. Sur le schéma de la (figure 44) , nous voyons
que le signal FI délivré par les étages HF, est amplifié par le transistor TR
qui compense par avance les pertes que va subir le signal de par son passage
dans le FOS (de l’ordre de 13 dB). Le signal FI sortant du FOS est ensuite
appliqué au circuit intégré pour y être amplifié et démodulé comme nous l’avons
vu précédemment.
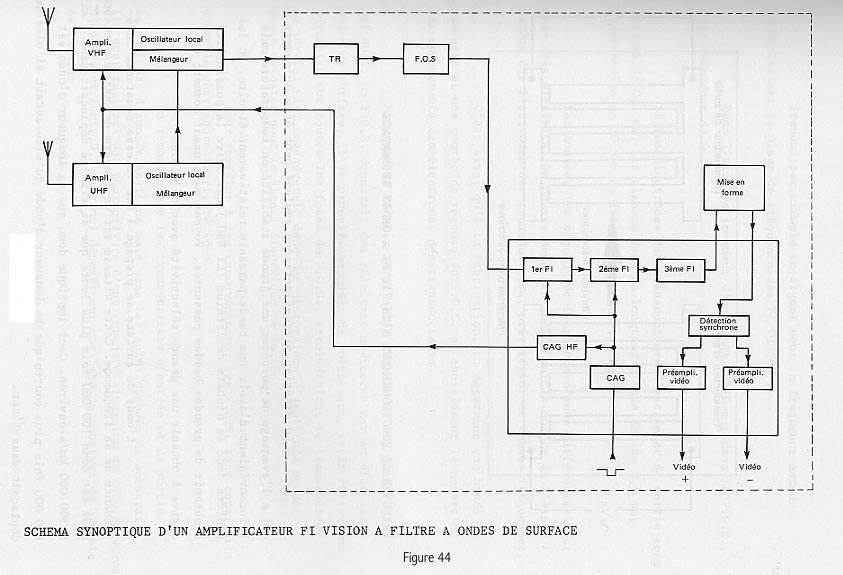{kind=link}
2) Filtres à
ondes de surface
Un filtre à ondes de
surface est essentiellement constitué d’un bloc de matériau piézo –électrique (figure 45) . A une extrémité, un transducteur d’entrée
transforme le signal d’entrée V![]() en
vibrations mécaniques appelées ondes de Rayleigh qui prennent naissance dans le
matériau piézo-électrique au niveau du transducteur d’entrée.
en
vibrations mécaniques appelées ondes de Rayleigh qui prennent naissance dans le
matériau piézo-électrique au niveau du transducteur d’entrée.
{kind=link}
Ces vibrations mécaniques
se propagent à la surface de ce matériau jusqu’à l’autre extrémité où un
transducteur de sortie les transforme en un signal électrique V![]() .
.
Le matériau
piézo-électrique employé peut être du quartz qui a l’avantage de posséder une
grande stabilité en température mais l’inconvénient d’avoir une bande passante
relativement étroite. On lui préfère donc le niobate de lithium (Li Nb0![]() )
qui offre la possibilité d’obtenir de grandes bandes passantes.
)
qui offre la possibilité d’obtenir de grandes bandes passantes.
L’onde de surface se
propage à une vitesse constante indépendante de sa fréquence. Cette vitesse est
de l’ordre de 3000 m/s. Cette onde est donc 100 000 fois plus lente que si
elle se déplaçait dans l’air à 300 000 Km/s environ. Ceci implique donc
que sa longueur d’onde est 100 000 fois plus courte que sa longueur d’onde
qu’elle aurait si elle se déplaçait dans l’air.
Prenons par exemple
un signal dont la fréquence est de 30 MHz(c’est la plage de fréquence des FI
vision).
Dans l’air, sa
longueur d’onde est de 10 m, dans le FOS, elle sera donc de 0,1 mm.
Si les électrodes
des transducteurs d’entrée et de sortie sont espacés de 0,1 mm, les signaux
dont la longueur d’onde est de 0,1 mm, c'est-à-dire de 30 MHz de fréquence,
vont être renforcés.
Par contre, les
signaux de longueurs d’onde différentes vont être affaiblis. On pourra donc, en
jouant sur le nombre et l’espacement des électrodes des transducteurs,
privilégier certaines fréquences.
C’est ainsi qu’à la
fabrication, on détermine une bande passante et une courbe de réponse du FOS en
choisissant le nombre et les espacements des électrodes des transducteurs.
Nous venons de voir
le principe des FOS. Or, construit tel quel, un FOS donnerait des résultats
médiocres car en plus des ondes de surface, il se produit des ondes de volume
qui, après réflexions multiples sur toutes les faces du FOS, atteindraient le
transducteur de sortie. Ceci engendrerait donc des distorsions d’amplitude et
de phase néfastes pour le signal électrique de sortie.
Pour remédier à ces
inconvénients, les FOS sont construits comme le représente la (figure
46 a) .
{kind=link}
On remarque que les
transducteurs d’entrée et de sortie ne sont pas disposés en ligne mais dans les
coins opposés du substrat. Ils sont réalisés par photogravure d’une couche
d’aluminium de 2000 Angstroems d’épaisseur (soit 0,2 microns) déposés sur une
face du substrat de niobate de lithium.
Entre les deux
transducteurs, une série de fins traits métalliques réalisent un coupleur.
De cette façon,
l’onde générée par le transducteur d’entrée induit des tensions sur les traits
métalliques du coupleur qui vont-elles mêmes générer des ondes de surface en
direction du transducteur de sortie. La longueur du coupleur est évidemment
très critique. Elle est calculée afin que l’énergie des vibrations mécaniques
soient réémise, le plus intégralement possible, dans la direction du
transducteur de sortie. Ainsi, cette disposition fait disparaître les
interférences dues aux ondes de volume.
En effet, les ondes
de volume émises par le transducteur d’entrée qui sont émises dans sa
direction, n’irons pas solliciter le transducteur de sortie, les deux
transducteurs n’étant pas alignés. D’autre part, le choix de la coupe
cristallographique du cristal de niobate de lithium est déterminant dans
l’affaiblissement des ondes de volume que l’on cherche toujours à diminuer.
La (figure
46 b) représente le boîtier dans lequel est logé un FOS.
3) Schéma d’un
amplificateur FI vision à FOS THOMSON
La (figure
47) représente le schéma d’un amplificateur FI vision à FOS
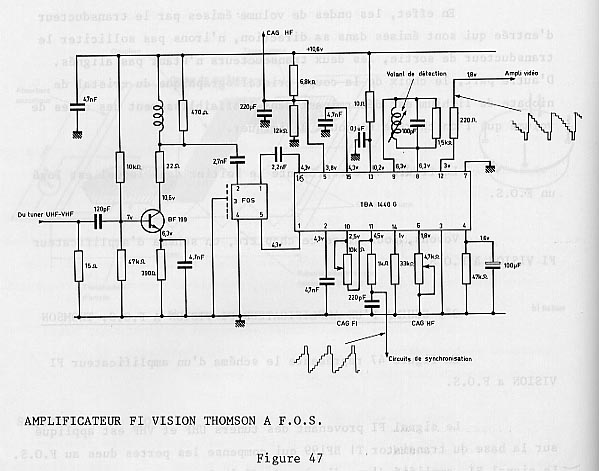{kind=link}
Le signal FI
provenant des tuners VHF et UHF est appliqué sur la base du transistor T1 BF
199 qui compense les pertes dues au FOS. Le signal FI, amplifié d’une dizaines de
décibels, est recueilli sur le collecteur du transistor T1 et appliqué à
l’entrée du FOS qui réalise la mise en forme de la bande passante au gabarit
requis. Le signal FI, récupéré en sortie du FOS, est appliqué sur la broche 16
du circuit intégré TBA 1440 qui est chargé d’amplifier et de démoduler le
signal FI.
Un signal vidéo
positif est délivré à la broche 12, il est destiné aux amplificateurs vidéo.
Un signal vidéo
négatif délivré à la broche 11, est acheminé aux circuits de synchronisation.
La tension de CAG HF
est présente sur la broche 5. Le seuil de CAG HF est ajusté au moyen du
potentiomètre reliée entre la masse et la broche 6. La CAG FI est réglée par le
potentiomètre câblé entre les broches 10 et 11.
III Amplificateur
FI vision en standards B, G, D et K
A) Standards B,
G, D et K
Dans ces quatre standards, la porteuse vision est modulée en amplitude par un signal vidéo négatif et la porteuse son est modulée en fréquence par le signal BF.
1) Standards
CCIR B et G
La (figure
48) représente le gabarit d’un canal B ou G. C’est deux standards ont de
nombreux points communs :
{kind=link}
![]() L’écart entre porteuses son et vision est de 5,5 MHz
L’écart entre porteuses son et vision est de 5,5 MHz
![]() La largeur de la bande vision est de 5 MHz
La largeur de la bande vision est de 5 MHz
![]() La bande résiduelle est de 0,75 MHz
La bande résiduelle est de 0,75 MHz
![]() Le rapport de puissances apparentes rayonnées image son est de 5/1
Le rapport de puissances apparentes rayonnées image son est de 5/1
![]() Le standard B est affecté aux VHF avec une largeur de canal de 7 MHz
Le standard B est affecté aux VHF avec une largeur de canal de 7 MHz
![]() Le standard G est affecté aux UHF avec une largeur de canal de 8 MHz
Le standard G est affecté aux UHF avec une largeur de canal de 8 MHz
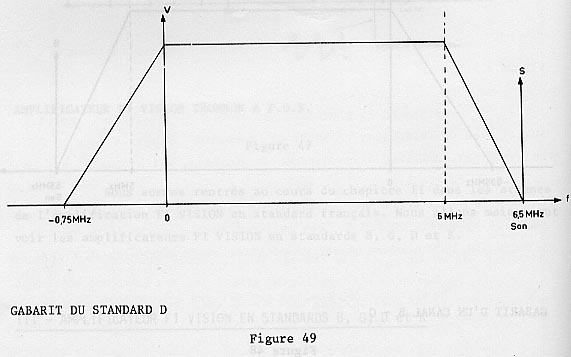
2) Standard D
La (figure
49) représente le gabarit d’un canal D
{kind=link}
![]() l’écart entre les porteuses son et vision est de 6,5 MHz
l’écart entre les porteuses son et vision est de 6,5 MHz
![]() La largeur de bande vision est de 6 MHz
La largeur de bande vision est de 6 MHz
![]() La bande résiduelle est de 0,75 MHz
La bande résiduelle est de 0,75 MHz
![]() Le rapport des puissances apparentes rayonnées image/son est de 5/1
Le rapport des puissances apparentes rayonnées image/son est de 5/1
![]() Le standard est affecté aux UHF
Le standard est affecté aux UHF
![]() La largeur de canal est de 8 MHz
La largeur de canal est de 8 MHz
3) Standard K
La (figure
50) représente le gabarit d’un canal K
{kind=link}
![]() L’écart entre les porteuses son et vision est de 6,5 MHz
L’écart entre les porteuses son et vision est de 6,5 MHz
![]() La largeur de la bande vision est de 6 MHz
La largeur de la bande vision est de 6 MHz
![]() La bande résiduelle est de 1,25 MHz
La bande résiduelle est de 1,25 MHz
![]() Le rapport des puissances apparentes rayonnées image/son est de 5/1
Le rapport des puissances apparentes rayonnées image/son est de 5/1
![]() Le standard est affecté aux UHF
Le standard est affecté aux UHF
![]() La largeur de canal est de 8 MHz
La largeur de canal est de 8 MHz
B) Courbe de
réponse d’un amplificateur FI vision en standard CCIR/BG
La porteuse FI
vision est à 38,9 MHz et la FI son est à 33,4 MHz.
1) Réception d’un
canal du standard G
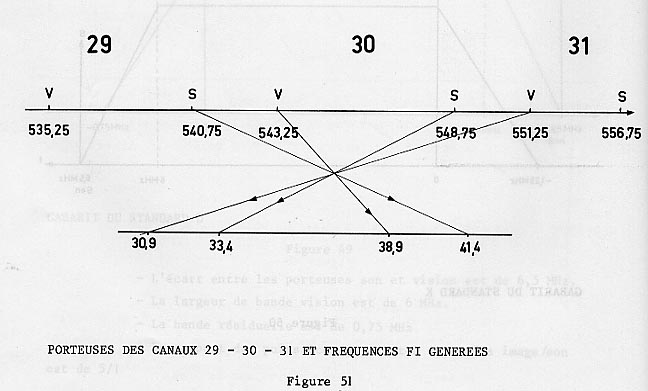
Soit à recevoir le
canal 30 du standard G dont la porteuse vision est à 543, 25 MHz et la porteuse
son à 548, 75 MHz.
L’oscillateur local fonctionne
à la fréquence de 582,15 Mhz. Le battement de cette fréquence avec les
porteuses son et vision du canal 30 détermine les porteuses FI son à 33,4 MHz
et vision à 38,9 MHz (figure 51) .
{kind=link}
On remarque, en
observant la (figure 51) que la porteuse son du canal 29
qui est à 540,75 MHz est très proche des porteuses du canal 30 qui est reçu. Il
en est de même pour la porteuse vision du canal 31 à 551,25 MHz.
Ces deux fréquences
peuvent franchir avec un certain affaiblissement, il est vrai, les circuits HF
qui sont centrés sur le canal 30. Le battement de ces deux fréquences, avec la
fréquence de l’oscillateur local va générer deux fréquences qui sont :
![]() 582,15 – 540,75 = 41,4 MHz
582,15 – 540,75 = 41,4 MHz
![]() 582,15 – 551,25 = 30,9 MHz
582,15 – 551,25 = 30,9 MHz
Ces deux fréquences
41,4 MHz et 30,9 MHz sont à rejeter.
2) Réception d’un
canal du standard B
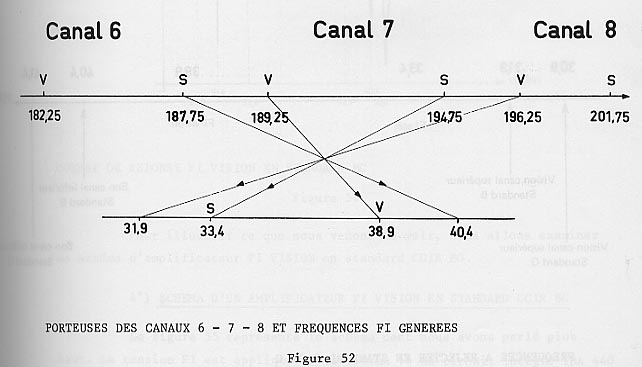
Soit à recevoir le
canal 7 du standard B dont la porteuse vision est à 189,25 MHz et la porteuse
son à 194,75 MHz.
L’oscillateur local
fonctionne à la fréquence de 228,15 MHz. Le battement de cette fréquence avec
les porteuses son et vision du canal 7 détermine les porteuses FI son à 33,4
MHz et vision à 38,9 MHz (figure 52) .
{kind=link}
D’autre part, on
s’aperçoit que la porteuse son du canal 6 qui est à 187,75 MHz est très proche
des porteuses du canal reçu 7. Il en est de même pour la porteuse vision du
canal 8 à 196,25 MHz.
Ces deux fréquences
peuvent franchir les circuits HF qui sont centrés sur le canal 7. Le battement
de ces deux fréquences avec la fréquence de l’oscillateur local va générer deux
fréquences proches des porteuses FI son et vision du canal reçu (figure 52) :
![]() 228,15 – 187,75 = 40,4 MHz
228,15 – 187,75 = 40,4 MHz
![]() 228,15 – 196,25 = 31,9 MHz
228,15 – 196,25 = 31,9 MHz
Ces deux fréquences
sont à rejeter.
3) Courbe de
réponse globale FI vision en standard BG
Les figures 51 et 52
font apparaître les fréquences à rejeter qui sont reportées dans la (figure 53) .
{kind=link}
La nécessité d’éliminer
les fréquences 30,9 MHz, 31,9 MHz, 40,4 MHz et 41,4 MHz conduit à la courbe de réponse de la (figure 54) . nous voyons la porteuse vision 38,9 MHz à – 6
dB et la porteuse son à 33,4 MHz à – 25 dB. Les quatre « creux » à
30,9 Mhz, 31,9 MHz, 40,4 MHz et 41,4 MHz correspondent aux fréquences à
réjecter.
{kind=link}
4) Schéma d’un
amplificateur FI vision en standard CCIR BG
La (figure
55) représente le schéma dont nous avons parlé plus haut. La tension FI est
appliquée à la broche 16 du circuit intégré TDA 440 après passage dans un
filtre de bande centré sur 36 MHz.
{kind=link}
Trois réjecteurs
éliminent les porteuses des canaux adjacents et un réjecteur centré sur 33,4
MHz abaisse à 25 dB la porteuse du canal son reçu. Le filtre connecté entre les
broches 9 et 8 est centré sur la bande FI, c'est-à-dire sur 36 MHz.
La broche 7 reçoit
les impulsions de retour ligne nécessaire à la fabrication de la tension de CAG
qui est disponible sur la broche 5. En agissant sur la tension de la broche 4,
on modifie la tension de CAG donc le gain des amplificateurs FI. La broche 4
reçoit la tension de commande de contraste.
Nous voyons que le
fonctionnement d’un tel amplificateur FI vision BG est en tout point semblable
à son homologue en standard français que nous avons vu plus en détail (E :
amplificateurs FI vision en standard français à circuits intégrés). Seul
différent les fréquences d’accord des filtres de bande et des réjecteurs. On
peut donc très bien remplacer tous ces circuits LC façonneurs de la bande
passante par un FOS spécifique au standard BG .
Nous avons vu la
philosophie générale des amplificateurs FI vision CCIR, en outre, nous avons
également noté que le son est véhiculé par une porteuse modulée en fréquence à
5,5 MHz de la porteuse vision. La (figure 54)
représentant la courbe de réponse d’un amplificateur FI vision au standard CCIR
fait apparaître, comme nous l’avons d’ailleurs vu, que la porteuse son, bien
qu’affaiblie de 25 dB par rapport au sommet de la courbe, est tout de même
présente en fin de chaîne FI vision. La porteuse son est donc amplifiée par
l’amplificateur FI vision. Il ne reste plus qu’à la prélever et à la détecter.
IV Démodulation
du son en standards à systèmes interporteuses
Avant d’aborder la
démodulation du son proprement dite, nous allons faire un rappel sur la
réception du son dans un système à porteuse vision modulée en amplitude et
porteuse son modulée en fréquence.
Nous avons vu
(2 : l’émission, synoptique d’un émetteur, les antennes) le principe
d’émission du son. Nous allons donc aborder maintenant la réception du son.
A) Réception du
son selon le système interporteuses ou intercarrier
Nous avons vu
précédemment que la courbe de réponse de l’amplificateur FI vision transmet
avec une certaine atténuation, mais dans son intégralité de forme, la porteuse
son modulée en fréquence.
La détection vidéo
fait apparaître différents signaux que nous allons examiner :
![]() Le signal vidéo
Le signal vidéo
![]() Le signal interporteuse modulé en fréquence autour de la fréquence
centrale à 5,5 MHz ou 6,5 MHz selon le standard. Ce signal interporteuse
apparaît par battements entre les porteuses son et vision au niveau de la
détection qui est un élément non linéaire.
Le signal interporteuse modulé en fréquence autour de la fréquence
centrale à 5,5 MHz ou 6,5 MHz selon le standard. Ce signal interporteuse
apparaît par battements entre les porteuses son et vision au niveau de la
détection qui est un élément non linéaire.
![]() Il y a également un signal BF du à la discrimination du signal FI son
modulé en fréquence par la courbe du détecteur FI vision.
Il y a également un signal BF du à la discrimination du signal FI son
modulé en fréquence par la courbe du détecteur FI vision.
![]() Enfin, les harmoniques des signaux générés.
Enfin, les harmoniques des signaux générés.
1) Extraction du
signal interporteuse
La (figure
56) fait apparaître les différentes possibilités d’extraction du signal
interporteuse.
{kind=link}
Le prélèvement du
signal interporteuse est effectué par un circuit LC accordé sur la fréquence à
extraire. Le prélèvement peut être effectué à des endroits différents dans la chaîne
d’amplification vidéo (figure 56) :
![]() Au niveau de la détection vidéo(a)
Au niveau de la détection vidéo(a)
![]() Sur le préamplificateur vidéo(b)
Sur le préamplificateur vidéo(b)
![]() Après l’amplification vidéo(c)
Après l’amplification vidéo(c)
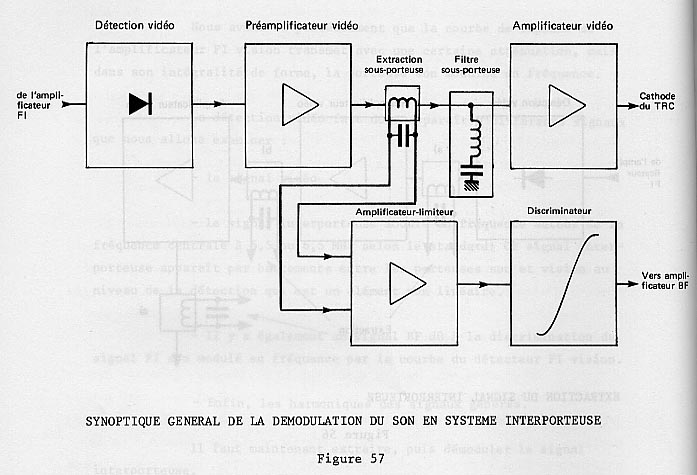
La solution la plus
couramment adoptée est le prélèvement sur le préamplificateur vidéo car on
bénéficie de l’amplificateur de cet étage. On aboutit ainsi au synoptique
général de la (figure 57) .
{kind=link}
Après la détection
vidéo, l’ensemble des signaux que nous avons vu est amplifié par le
préamplificateur vidéo.
Un circuit LC
accordé sur la fréquence du signal interporteuse prélève celui-ci au niveau du
préamplificateur vidéo. Le signal interporteuse est alors appliqué à un ampli
limiteur avant d’être démodulé par un discriminateur. Le signal BF délivré est
acheminé vers l’amplificateur BF.
Revenons un instant
à la chaîne d’amplification vidéo où nous étions arrêtés à l’extraction du
signal interporteuse. A ce niveau le signal interporteuse présent doit être
éliminé du signal vidéo sinon il provoquerait des moirages sur l’écran. Un
circuit bouchon centré sur la fréquence du signal interporteuse bloque donc ce
signal avant l’amplificateur vidéo (filtre S/P).
2) Démodulation
d’une onde modulée en fréquence
a) Discriminateur
Foster-Seeley
La (figure
58) représente le schéma type d’un discriminateur Foster-Seeley qui est
constitué d’une part par un circuit L3C3 primaire et d’autre part, d’un circuit
L1 L2 C4 secondaire symétrique, tous deux accordés sur la FI (5,5 MHz en
standard B ou G et 6,5 MHz en standard D ou K).
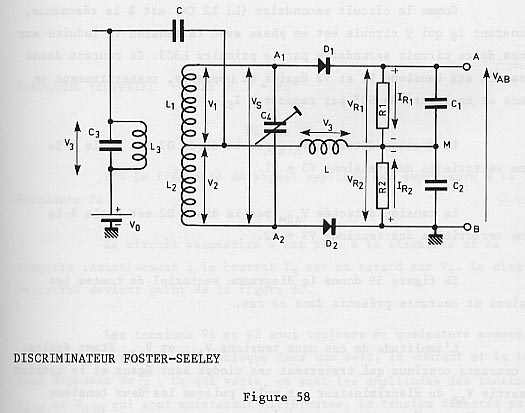{kind=link}
Le condensateur C a
une valeur élevé donc une impédance très faible.
L’inductance L est
une bobine de choc à la fréquence FI(5,5 MHz ou 6,5 MHz).
La tension FI existant
aux bornes du circuit primaire L3C3 se retrouve donc pratiquement aux bornes de
la bobine L.
Pour comprendre le
fonctionnement du système, considérons
les trois cas qui peuvent se présenter :
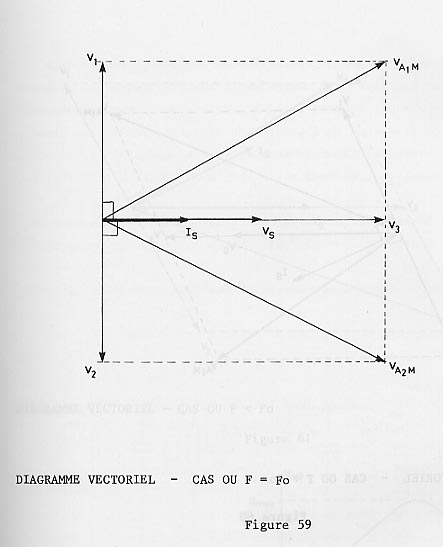
1) La fréquence
du signal appliqué est égale à la fréquence d’accord Fo des circuits accordés
primaire et secondaire.
Comme le circuit
secondaire (L1 L2 C4) est à la résonance, Le courant I![]() qui y circule est en phase avec la tension V
qui y circule est en phase avec la tension V![]() induite aux bornes de ce circuit secondaire par le primaire L3C3. Ce courant
donne naissance aux tensions V
induite aux bornes de ce circuit secondaire par le primaire L3C3. Ce courant
donne naissance aux tensions V![]() et
V
et
V![]() égales et opposées, respectivement en avance et en retard de 90° par rapport à
I
égales et opposées, respectivement en avance et en retard de 90° par rapport à
I![]() .
.
La tension détectée
V![]() par la diode D1 est égale à la somme vectorielle des tensions V
par la diode D1 est égale à la somme vectorielle des tensions V![]() +
V
+
V![]() .
.
La tension détectée
V![]() par la diode D2 est égale à la somme vectorielle des tensions V
par la diode D2 est égale à la somme vectorielle des tensions V![]() +
V
+
V![]() .
.
La (figure
59) donne le diagramme vectoriel de toutes les tensions et courants
présents dans ce cas.
{kind=link}
L’amplitude de ces
deux tensions V![]() et
V
et
V![]() étant égales, les courants continus qui traversent ces diodes sont égaux et la
tension de sortie V
étant égales, les courants continus qui traversent ces diodes sont égaux et la
tension de sortie V![]() du
discriminateur est nulle puisque les deux tensions détectées V
du
discriminateur est nulle puisque les deux tensions détectées V![]() et V
et V![]() sont en opposition.
sont en opposition.
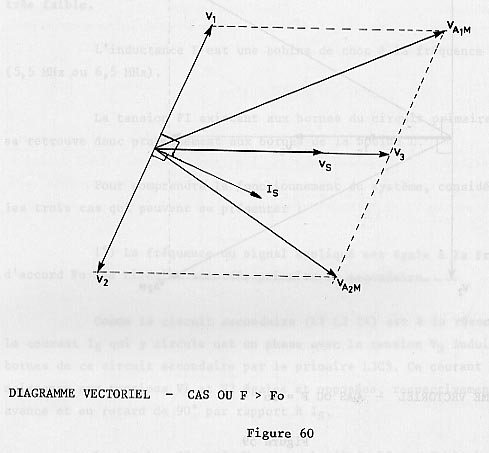
2) La fréquence
du signal appliqué est supérieure à la fréquence Fo.
Le circuit secondaire
n’est plus à la résonance et se comporte inductivement, le courant I![]() est en retard sur V
est en retard sur V![]() .
Le diagramme vectoriel devient celui de la (figure 60) .
.
Le diagramme vectoriel devient celui de la (figure 60) .
{kind=link}
Les tensions V![]() et
V
et
V![]() sont
toujours en quadrature avance et retard par rapport à I
sont
toujours en quadrature avance et retard par rapport à I![]() puisque dans une self, le courant et la tension sont déphasés de
puisque dans une self, le courant et la tension sont déphasés de ![]() . Ce qui varie, ce sont les amplitudes des
tensions V
. Ce qui varie, ce sont les amplitudes des
tensions V![]() et
V
et
V![]() qui sont maintenant différentes. La tension détectée par la diode D1 est plus
grande que celle détectée par la diode D2, ce qui rend la tension de sortie V
qui sont maintenant différentes. La tension détectée par la diode D1 est plus
grande que celle détectée par la diode D2, ce qui rend la tension de sortie V![]() du
discriminateur positive car V
du
discriminateur positive car V![]() est alors supérieure à V
est alors supérieure à V![]() en
amplitude.
en
amplitude.
3) La fréquence
du signal appliqué est inférieure à Fo.
Le raisonnement est
similaire : le circuit secondaire se comporte alors capacitivement :
le courant I![]() est donc en avance sur la tension V
est donc en avance sur la tension V![]() .
.
Le diagramme
vectoriel, dans ce cas, est représenté (figure 61) .
{kind=link}
La tension V![]() détectée
est inférieure en amplitude à la tension V
détectée
est inférieure en amplitude à la tension V![]() et
la sortie du discriminateur est alors négative.
et
la sortie du discriminateur est alors négative.
Ainsi la courbe de
réponse d’un discriminateur Foster-Seeley est de la forme indiquée (figure 62) .
{kind=link}
Il est évident que
la tension de sortie V![]() ne
continue pas indéfiniment à monter ou à descendre lorsque la fréquence
appliquée augmente ou diminue par rapport à Fo. A partir d’un certain
éloignement par rapport à la fréquence Fo d’accord des circuits, toutes les
tensions des diagrammes vectoriels diminuent puisque l’on dépasse la bande
passante des circuits primaire et secondaire.
ne
continue pas indéfiniment à monter ou à descendre lorsque la fréquence
appliquée augmente ou diminue par rapport à Fo. A partir d’un certain
éloignement par rapport à la fréquence Fo d’accord des circuits, toutes les
tensions des diagrammes vectoriels diminuent puisque l’on dépasse la bande
passante des circuits primaire et secondaire.
b) discriminateur
à circuits décalés ou discriminateur de Travis
La (figure
63) représente le schéma type d’un discriminateur de Travis.
{kind=link}
Ce système est
composé d’un circuit primaire L![]() C
C![]() accordé sur la fréquence de repos Fo du signal (5,5 MHz ou 6,5 MHz) et de deux
circuits secondaires.
accordé sur la fréquence de repos Fo du signal (5,5 MHz ou 6,5 MHz) et de deux
circuits secondaires.
Le circuit L![]() C
C![]() est accordé sur une fréquence F1 supérieure à la fréquence de repos du signal
(F1 = Fo + f).
est accordé sur une fréquence F1 supérieure à la fréquence de repos du signal
(F1 = Fo + f).
Le circuit L![]() C
C![]() est accordé sur une fréquence F2 inférieure à la fréquence de repos du signal
(F2 = Fo – f).
est accordé sur une fréquence F2 inférieure à la fréquence de repos du signal
(F2 = Fo – f).
1) Considérons
d’abord le cas où la fréquence du signal est égale à Fo.
Les circuits
secondaires L![]() C
C![]() et
L
et
L![]() C
C![]() sont donc désaccordés respectivement d’une valeur –f
et +f .
sont donc désaccordés respectivement d’une valeur –f
et +f .
Les circuits L![]() C
C![]() et
L
et
L![]() C
C![]() délivrent une tension égale, ce qui entraîne la circulation d’un courant I
délivrent une tension égale, ce qui entraîne la circulation d’un courant I![]() dans la diode D
dans la diode D![]() et
la résistance R
et
la résistance R![]() ,
égal au courant I
,
égal au courant I![]() dans la diode D
dans la diode D![]() et
la résistance R
et
la résistance R![]() .
Les courants I
.
Les courants I![]() et
I
et
I![]() sont égaux et déterminent des tensions U
sont égaux et déterminent des tensions U![]() et
U
et
U![]() égales et opposés. Donc
égales et opposés. Donc ![]() +
+ ![]() = 0.
= 0.
Aucune tension
n’apparaît en sortie du discriminateur quand la fréquence du signal est égale à
Fo.
2) Voyons
maintenant le cas où la fréquence du signal est supérieure à Fo.
Le circuit L![]() C
C![]() délivre une tension supérieure à la tension délivrée par L
délivre une tension supérieure à la tension délivrée par L![]() C
C![]() ,
le courant I
,
le courant I![]() dans D
dans D![]() est supérieur au courant I
est supérieur au courant I![]() dans D
dans D![]() .
Par conséquent, la tension U
.
Par conséquent, la tension U![]() est supérieure à la tension U
est supérieure à la tension U![]() .
La tension résultante entre A et B égale à
.
La tension résultante entre A et B égale à
![]() +
+ ![]() est telle que si le point B est à la masse, la
tension détectée V
est telle que si le point B est à la masse, la
tension détectée V![]() est négative pour un signal de fréquence supérieure à Fo.
est négative pour un signal de fréquence supérieure à Fo.
3)Dans le cas
inverse où la fréquence du signal est inférieure à Fo.
Le circuit L![]() C
C![]() délivre une tension supérieure à la tension délivrée par L
délivre une tension supérieure à la tension délivrée par L![]() C
C![]() .
Le courant I
.
Le courant I![]() dans R
dans R![]() est supérieur au courant I
est supérieur au courant I![]() dans
R
dans
R![]() .
La tension U
.
La tension U![]() est supérieure à la tension U
est supérieure à la tension U![]() .
La tension résultante V
.
La tension résultante V![]() est donc positive pour un signal de fréquence inférieure à Fo.
est donc positive pour un signal de fréquence inférieure à Fo.
La (figure
64) qui est une synthèse de ce que nous venons de voir est la courbe de
réponse du discriminateur de Travis.
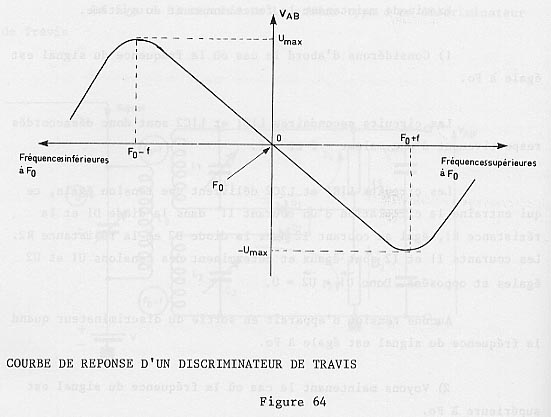{kind=link}
c) Démodulation
synchrone FM
La (figure
65) représente le principe général d’un démodulateur synchrone FM .
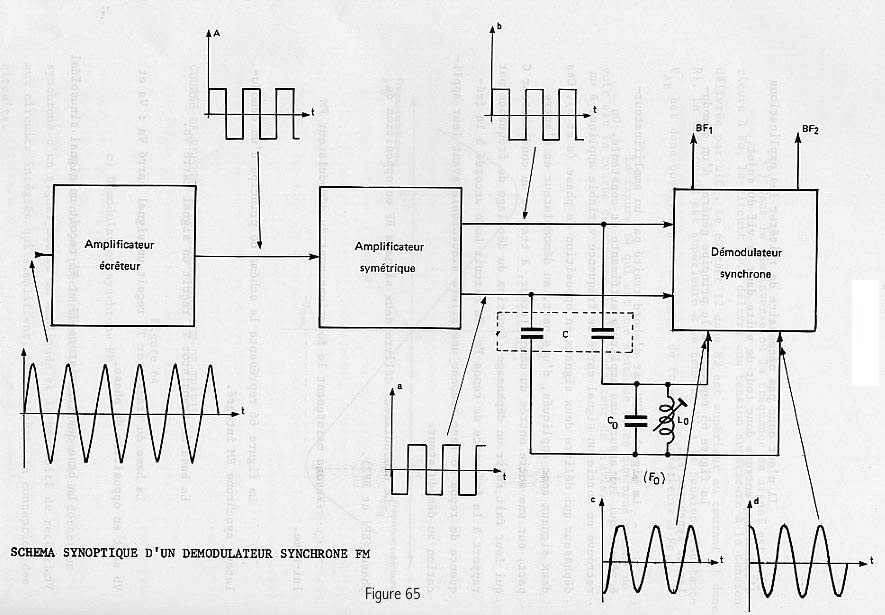{kind=link}
Le signal FI/FM est
d’abord traité par un amplificateur écrêteur qui lui assure une amplitude
suffisante et constante. On retrouve en sortie un signal carré de fréquence
variable appliqué à un déphaseur qui délivre deux signaux en opposition de
phase (a et b). Ces deux signaux sont appliqués, d’autre part, au démodulateur
et d’autre part, sur une autre entrée du démodulateur, à travers un
condensateur C qui leur fait subir un déphasage, fonction du décalage de
fréquence par rapport à la fréquence de repos Fo. Un circuit LoCo accordé à la
fréquence de repos Fo leur redonne une allure sinusoïdale avant leur
application au démodulateur.
Le démodulateur
délivre deux signaux BF en opposition de phase (BF1 et BF2).
La (figure
66) représente le schéma de principe d’un démodulateur synchrone FM
intégré.
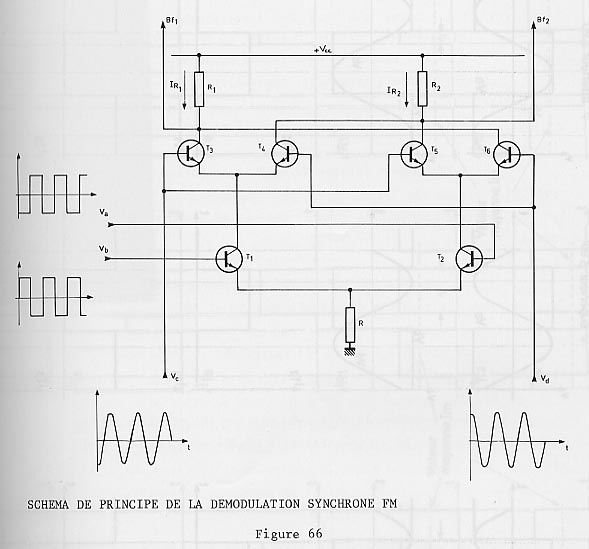{kind=link}
La base du
transistor T1 reçoit un signal carré Vb.
La base du
transistor T2 reçoit un signal carré Va : Va et Vb sont en opposition de
phase.
La base des
transistors T3 et T5 reçoit un signal sinusoïdal Vc.
La base des
transistors T4 et T6 reçoit un signal sinusoïdal Vd.
Les signaux Vc et Vd
sont, d’autre part, en opposition de phase et d’autre part, leur phase varie
autour de la quadrature (90°) par rapport aux signaux Va et Vb en fonction de
la fréquence du signal à démoduler. Ce système va donc détecter un glissement
de phase entre les signaux Vc – Vd et les signaux Va – Vb.
La (figure
67) représente les différents signaux du démodulateur synchrone FM.
{kind=link}
![]() T1 conduit lorsque le signal Vb est positif.
T1 conduit lorsque le signal Vb est positif.
![]() T2 est bloqué lorsque T1 est conducteur.
T2 est bloqué lorsque T1 est conducteur.
![]() T3 conduit lorsque T1 conduit et lorsque le signal Vc est positif.
T3 conduit lorsque T1 conduit et lorsque le signal Vc est positif.
![]() T4 conduit lorsque T1 conduit et lorsque le signal Vd est positif.
T4 conduit lorsque T1 conduit et lorsque le signal Vd est positif.
![]() T5 conduit lorsque T2 conduit et lorsque le signal Vc est positif.
T5 conduit lorsque T2 conduit et lorsque le signal Vc est positif.
![]() T6 conduit lorsque T2 conduit et lorsque le signal Vd est positif.
T6 conduit lorsque T2 conduit et lorsque le signal Vd est positif.
On constate que le
courant IR1 parcourant la résistance R1 est la somme des courants des
transistors T3 et T6.
De même, le courant
IR2 parcourant la résistance R2 est la somme des courants des transistors T4 et
T5.
Les tensions de
sortie du système BF1 et BF2 s’établissent aux bornes de R1 et R2 et sont égales
à R1 x IR1 pour BF1 et R2 x IR2 pour BF2.
Les tensions BF1 et
BF2 sont symétriques.
On peut constater
que lorsque les signaux Va et Vc (donc Vb et Vd) sont déphasés de 90° (signal
FI non modulé), les courants IR1 et IR2 ont la forme de créneaux avec un
rapport cyclique égale à ½ .
La valeur moyenne de
ces courants est égale à la moitié de l’amplitude maximale.
Lorsque le signal FI
est modulé en fréquence, l’angle ![]() de déphasage varie avec l’excursion de
fréquence.
de déphasage varie avec l’excursion de
fréquence.
Dans le cas de la (figure 67 b) , l’angle ![]() de déphasage est supérieur à 90°, on obtient
un courant IR1 dont la valeur moyenne est supérieure à la précédente (pour IR2,
la valeur moyenne est inférieure à la précédente).
de déphasage est supérieur à 90°, on obtient
un courant IR1 dont la valeur moyenne est supérieure à la précédente (pour IR2,
la valeur moyenne est inférieure à la précédente).
Dans le cas de la (figure 67 c) , l’angle ![]() de déphasage est inférieur à 90°, on obtient
un courant IR1 dont la valeur moyenne est inférieure à celle obtenue dans le
cas où
de déphasage est inférieur à 90°, on obtient
un courant IR1 dont la valeur moyenne est inférieure à celle obtenue dans le
cas où ![]() = 90° (pour IR2, la valeur moyenne est
supérieure à celle obtenue pour
= 90° (pour IR2, la valeur moyenne est
supérieure à celle obtenue pour ![]() = 90°).
= 90°).
La valeur moyenne du
courant de sortie IR1 (ou IR2) dépend donc de l’angle de déphasage ![]() existant entre les signaux injectés sur les
entrées a et b et les signaux appliqués sur les entrées c et d.
existant entre les signaux injectés sur les
entrées a et b et les signaux appliqués sur les entrées c et d.
Pour IR1, cette
valeur moyenne augmente linéairement avec l’angle ![]() et inversement diminue lorsque cet angle
diminue. Pour IR2, c’est exactement l’inverse : les deux sorties e et f
sont symétriques.
et inversement diminue lorsque cet angle
diminue. Pour IR2, c’est exactement l’inverse : les deux sorties e et f
sont symétriques.
En résumé, on peut
dire que ce démodulateur appartient à la catégorie des détecteurs de phase. Dans
ce type de démodulateur, on exploite la caractéristique fréquence phase d’un
circuit résonant pour transformer la déviation instantanée de fréquence en une
déviation proportionnelle de phase. Cette déviation de phase est transformée en
variation de la valeur moyenne du courant de sortie.
Le but est dons
atteint puisqu’à une variation de fréquence à l’entrée, on fait correspondre
une variation d’amplitude en sortie.
d) Circuits
annexes aux discriminateurs
Nous avons vu au
cours de l’étude des discriminateurs que leur propriété essentielle était
d’être sensibles à la fréquence du signal qui leur est appliqué. Or, ils sont
également sensibles aux variations d’amplitude du signal qu’ils doivent
démoduler et ceci est un inconvénient majeur.
Pour y remédier, le
signal à démoduler subit une limitation en amplitude afin de lui conférer une
amplitude constante à l’entrée du discriminateur.
Un limiteur
d’amplitude est constitué par exemple de deux diodes, montées en tête bêche,
comme le montre la (figure 68) . Un tel dispositif
délivre bien une tension égale au seuil des diodes. Il peut être nécessaire de
le faire suivre d’un amplificateur afin d’augmenter l’amplitude du signal.
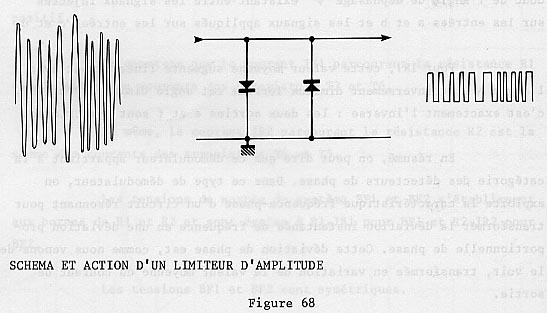{kind=link}
D’autre part, si le
signal avant limitation a une amplitude
inférieure au seuil des diodes, il faut l’amplifier avant afin de rendre
efficace l’action du limiteur. On arrive donc parfois au schéma général
amplificateur limiteur amplificateur.
On résout élégamment
ce problème en adaptant un limiteur à transistors. En effet, il suffit de
choisir sa polarisation pour qu’il y ait limitation par blocage et saturation
du transistor lors des alternances positives et négatives du signal.
Dans le cas de
démodulateurs synchrones intégrés, le limiteur fait partie du circuit intégré.
Un autre circuit
important est le circuit de désaccentuation au déemphasis. Ce circuit, sous forme d’un réseau RC, fait
partie des composants des discriminateurs. C’est un réseau RC intégrateur ou
filtre passe bas qui, comme son nom l’indique, désaccentue (ou atténue) les
fréquences élevées BF démodulées. Un tel circuit est nécessaire, car à
l’émission, les fréquences hautes BF à transmettre sont favorisées par rapport
aux autres pour compenser leur atténuation durant la transmission. Ceci est
particulier à l’émission FM. Il faut donc diminuer leur amplitude à la
réception, c’est ce qui est fait afin de rendre au signal BF sa fidélité.
e) Schéma d’un
démodulateur son sur un téléviseur fonctionnant en standard BG
Nous allons examiner
un schéma de démodulateur son à circuit intégré, d’un téléviseur fonctionnant
en standard B ou G. La fréquence de
l’interporteuse est donc de 5,5 MHz. La (figure 69)
représente ce démodulateur. La porteuse son à 5,5 MHz, modulée en fréquence,
est prélevée en sortie de la détection vidéo.
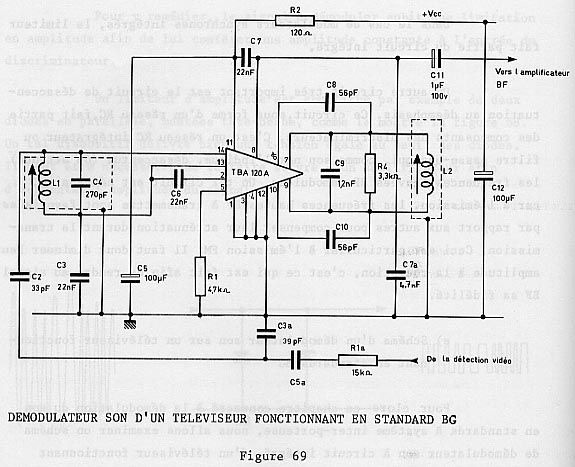{kind=link}
Cette porteuse son
est acheminée à la bobine FI son L1 par la résistance R1a et le filtre
constitué par les condensateurs C5a, C3a
et C2. Ce filtre et l’ensemble L1, C4 accordé sur 5,5 MHz sélectionnent la
porteuse son parmi les autres fréquences présentes dans le signal vidéo.
Les deux
condensateurs C8 et C10 de 56 pF, le condensateur C9, la bobine L2 et la
résistance R4 constituent le réseau déphaseur.
Le condensateur C7
constitue avec la résistance interne au circuit intégré, le circuit de
désaccentuation. Le signal BF démodulé, disponible sur la broche 8 du circuit
intégré, est envoyé à l’amplificateur BF.
V Platines FI multistandards
Les différents standards
utilisés par les pays nécessitent, si l’on veut en recevoir plusieurs avec le
même récepteur, de concevoir des platines Fi qui puissent avoir des bandes
passantes différentes et adaptables à ces différents standards.
Ces platines
multistandards ont exactement la même architecture que toutes celles que nous
avons vues, elles sont en fait l’addition de différentes platines pouvant
recevoir chacune un standard bien précis.
Nous avons vu, dans
les chapitres précédents, la façon d’obtenir une bande passante à l’aide de
filtres de bande et de réjecteurs. Pour passer d’un standard à l’autre, il
suffit de mettre en service certains de ces filtres et de ces réjecteurs. La
commutation de ces différents circuits est effectuée par des diodes auxquelles
on applique une tension de façon à les bloquer ou à les saturer.
Si l’on dispose d’un
téléviseur pouvant recevoir les standards BG et L, il faut pouvoir obtenir la
courbe de réponse BG ou L comme le représente la (figure 70)
.
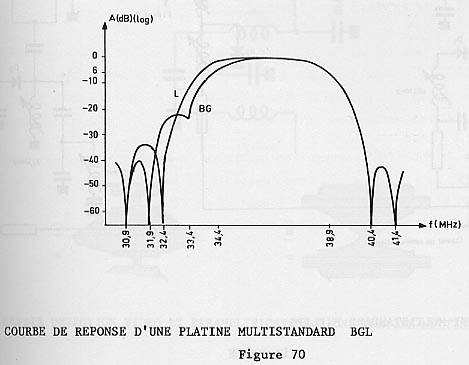{kind=link}
La (figure
71) représente le schéma d’une platine multistandard Philips dont les
circuits sont commutés à l’aide de diodes.
{kind=link}
Le commutateur I1,
lorsqu’il est fermé, rend la diode D1 passante.
Le réjecteur 40,4
MHz est donc en service, pour les standards B ou G, le commutateur I2 rend la
diode D2 passante lorsqu’il est fermé.
Dans ce cas, le
circuit extracteur de la sous porteuse son est en service et celle-ci peut être
dirigée vers le discriminateur.
Le commutateur I3
rend la diode D3 passante quand il est fermé, ce qui permet l’atténuation du
son FM par le réjecteur à 33,4 MHz en standard BG.
Un autre problème se
pose lors du changement de standard outre ces réjections.
En standard BG, la
vidéo est négative alors qu’en standard L, la vidéo est positive. Or, il faut,
quel que soit le standard reçu, envoyer à la cathode du tube cathodique, la
vidéo en lancées négatives. On a plusieurs possibilités pour cela.
La (figure
72) représente le schéma de principe du système.
{kind=link}
Dans le cas de la
réception d’une émission en standard L, le signal A est détecté par la diode
qui délivre l’enveloppe positive du signal. On prélève alors le signal vidéo A
en lancées négatives au point A, ce signal sera acheminé vers l’amplificateur
vidéo.
Dans le cas de la
réception d’une émission en standard BG, le signal B est détecté par la diode
qui délivre également l’enveloppe positive du signal. Le signal vidéo détecté
est alors en lancée négative et il est prélevé au point B.
Notons au passage
que la trappe de sous porteuse son dans la voie B, ne creuse pas la bande
passante de la vidéo quand le standard L est reçu. D’autre part, le prélèvement
de la FI son FM peut s’effectuer au niveau de l’émetteur du transistor TR.