Circuits de télécommande à
ultrasons, à infrarouges
I – Généralités sur les
télécommandes
Ces systèmes ont commencé à
se développer avec la multiplication des chaînes proposées par la plupart des
pays et la nécessité pour le téléspectateur de changer souvent de canal de
réception pour choisir son programme.
Mais c’est surtout avec la
télévision en couleurs que la télécommande a pris toute sa valeur car le
réglage correct de la couleur ne peut être évalué de façon satisfaisante qu’à
une certaine distance de l’écran.
Avec les télécommandes
classiques, le téléspectateur peut, à plusieurs mètres de distance, régler le
volume sonore, le contraste, la luminosité et la saturation des couleurs de
l’image, effectuer la commutation des canaux reçus, supprimer momentanément le
son, enfin, éteindre l’appareil et l’allumer grâce à une position veille sur le
récepteur.
Outre un indubitable
surcroît de confort, la télécommande permet également d’éliminer tous les
organes mécaniques de commutations et de réglages au niveau du clavier, ce qui
supprime bon nombre de pannes dues à l’usure ou à l’encrassement. Les premières
télécommandes sont apparues dans les années 1960 : elles étaient à câble
(reliées au récepteur) et leurs possibilités étaient réduites. Ce n’est qu’avec
l’apparition de circuits intégrés spécifiques à cette application que ces
systèmes ont atteint un degré élevé d’efficacité et de fiabilité en devenant
entièrement électroniques sans aucune liaison mécanique avec le téléviseur.
Un système de télécommande électronique
se compose essentiellement d’un émetteur et d’un récepteur installé sur le
téléviseur lui même.
La transmission des signaux
correspondants aux diverses commandes se fait, soit au moyen d’ultrasons, soit
au moyen de rayons infrarouges comme le montre la (figure 1)
.
{kind=link}
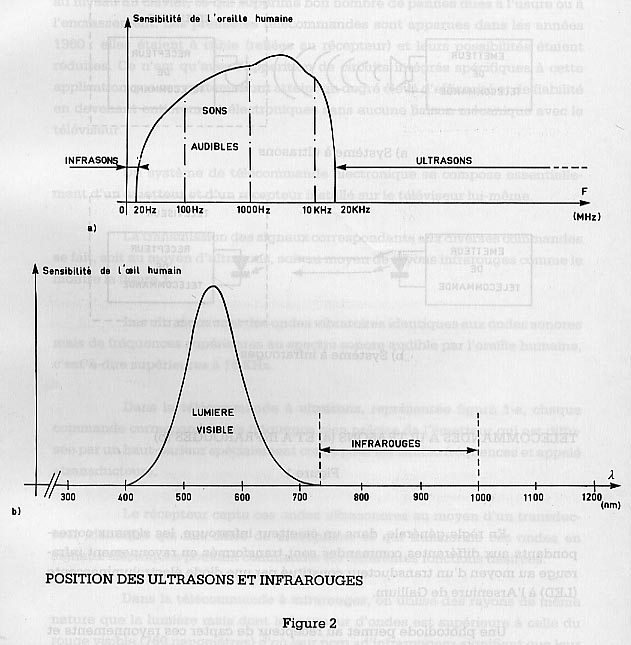
Les ultrasons sont des ondes
vibratoires identiques aux ondes sonores mais de fréquences supérieure au
spectre sonore audible par l’oreille humaine, c’est à dire supérieure à 16 KHz.
Dans la télécommande à
ultrasons, représentée (figure 1 a) , chaque commande correspond à une
fréquence bien précise de l’émetteur qui est diffusée par un haut parleur
spécialement conçu pour les hautes fréquences et appelé transducteur.
Le récepteur capte ces ondes
ultrasonores au moyen d’un transducteur identique qui fait office de microphone
et qui transforme ces ondes en signaux électriques pouvant commander les
différentes fonctions désirées.
Dans la télécommande à
infrarouges (figure 1 b) , on utilise des rayons de
même nature que la lumière mais dont la longueur d’ondes est supérieure à celle
du rouge visible (760 nanomètres) d’où leur nom d’infrarouges signifiant que
leur fréquence est en dessous (infra) de la fréquence de la lumière rouge.
La (figure 2) donne, pour
résumer, les représentations comparées de la sensibilité de l’oreille et de
l’œil humain, ainsi que la position des ultrasons et des rayons infrarouges par
rapport à ces spectres.
{kind=link}
En règle générale, dans un
émetteur infrarouge, les signaux correspondants aux différentes commandes sont
transformés en rayonnement infrarouge au moyen d’un transducteur constitué par
une diode électroluminescente (LED) à l’Arséniure de Gallium.
Une photodiode permet au
récepteur de capter ces rayonnements et de les reconvertir en signaux
électriques qui seront appliqués aux commandes incriminées.
En résumé, les deux systèmes
de télécommande à ultrasons ou à rayons infrarouges se différencient uniquement
par la nature de l’onde utilisée pour effectuer la liaison entre émetteur et
récepteur.
II – Les
transducteurs
A)
Transducteurs
à ultrasons
Pour transformer des signaux
électriques en ondes ultrasonores, on peut utiliser un haut parleur de type
électrostatique semblable à ceux employés comme tweeters (haut parleur pour
fréquences aiguës) dans les enceintes HI-FI.
Le principe de
fonctionnement d’un haut parleur électrostatique est très simple : en
appliquant une différence de potentiel entre deux plaques métalliques séparées
par des entretoises isolantes, ces plaques tendent à s’attirer donc à se
déformer.
En rendant l’une des ces
plaques suffisamment flexible par rapport à l’autre, c’est elle qui subit
principalement les déformations. Cette plaque est appelée membrane tandis que
l’autre, fixe, est appelée contre électrode.
Si la tension appliquée à
ces plaques varie, la force d’attraction qui les attire varie également, ce qui
se manifeste par un déplacement correspondant de la membrane.
Ainsi, en appliquant une
tension à fréquence ultrasonique au système, celle ci sera transformée en
vibrations ultrasonores au niveau de la membrane et donc de la masse d’air
ambiante.
Il convient de noter que si
l’on applique uniquement la tension alternative au transducteur, la membrane se
déplacera toujours du même côté aussi bien pendant l’alternance positive que
pendant l’alternance négative car les charges électriques présentes sur la
membrane et sur la contre électrode sont égales et de signe contraire.
Pour éviter ce défaut qui
engendre une distorsion des oscillations produites, on a recours à une tension
Vp de polarisation comprise entre 100 et 300 volts selon les cas.
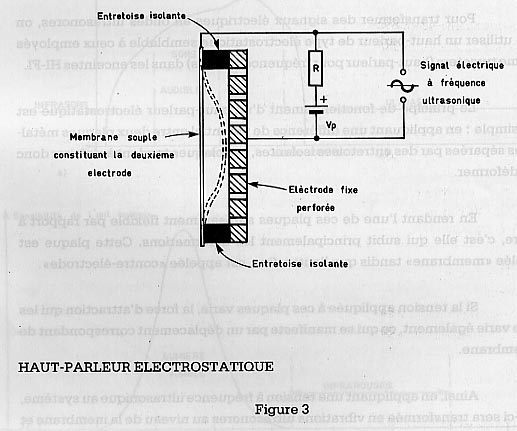
La (figure 3) donne une
représentation schématique d’un transducteur à ultrasons fonctionnant sur ce
principe.
{kind=link}
La membrane est formée d’une
feuille de matière plastique spéciale appelée styroflex de 20 microns environ
d’épaisseur et sur laquelle est déposée une feuille d’or conductrice.
L’électrode fixe ou contre
électrode est une plaque conductrice perforée dont les évents servent à évacuer
l’air compressé qui se forme à l’intérieur du haut parleur lorsque la membrane
se rapproche de la contre électrode.
Le champ électrostatique se
forme donc entre cette électrode perforée et la feuille d’or de la membrane.
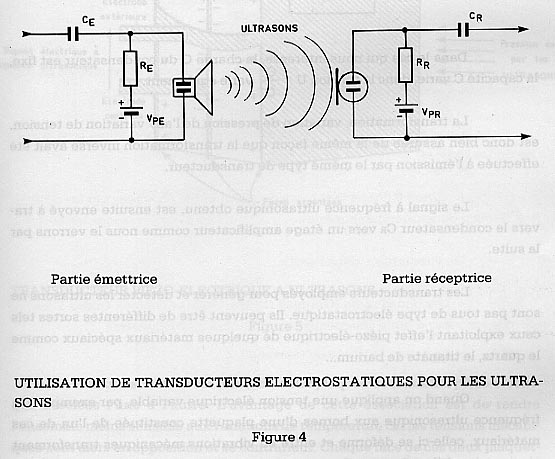
L’alimentation Vp fournit la
tension de polarisation dont nous avons parlé et à laquelle se superpose le
signal à la fréquence ultrasonique à émettre. Dans la (figure 4) est représenté
le schéma électrique d’emploi du transducteur électrostatique décrit.
{kind=link}
Dans le récepteur de la
télécommande, on peut également utiliser le même type de transducteur qui se
comportera alors comme un microphone à condensateur.
La membrane et la contre
électrode constituent dans ce cas, les armatures d’un condensateur qui est
chargé par une tension de polarisation ![]() fixe comprise entre
100 et 300 volts.
fixe comprise entre
100 et 300 volts.
Lorsque les ondes
ultrasonores provoquent la vibration de la membrane de ce microphone, ce qui
fait varier la capacité du condensateur, puisque l’épaisseur du dialectique
(l’air) varie, la tension présente à ses bornes varie.
Ceci est la conséquence
directe de la relation (1) liant la charge (Q), la capacité (C) et la tension
(U) aux bornes d’un condensateur : Q = CU. Dans
le cas qui nous intéresse, la charge Q du condensateur est fixe, la capacité C
varie, dont la tension U = ![]() varie également.
varie également.
La transformation, variation
de pression de l’air / variation de tension est donc bien assurée de la même
façon que la transformation inverse avait été effectuée à l’émission par le
même type de transducteur.
Le signal à fréquence
ultrasonique obtenu, est ensuite envoyé à travers le condensateur CR vers un
étage amplificateur comme nous le verrons par la suite.
Les transducteurs employés
pour générer et détecter les ultrasons ne sont pas tous de type
électrostatique. Ils peuvent être de différentes sortes tels ceux exploitant
l’effet piézo-électrique de quelques matériaux spéciaux comme le quartz, le
titanate de baryum ….
Quand on applique une
tension électrique variable, par exemple à la fréquence ultrasonique aux bornes
d’une plaquette constituée de l’un de ces matériaux, celle ci se déforme et
entre en vibrations mécaniques transformant ainsi un signal électrique en
ultrasons, c’est ce que l’on appelle l’effet direct.
Cette propriété est
réversible, c’est ce que l’on appelle l’effet inverse. En soumettant cette même
plaquette à des ultrasons, ceux ci provoquent des vibrations mécaniques du
transducteur et par la même, des oscillations électriques de même fréquence à
ses bornes.
La (figure 5) représente un
transducteur piézo-électrique utilisé comme transducteur à ultrasons.
{kind=link}
Ce transducteur est formé de
deux plaques de matériau piézo-électrique accolées l’une à l’autre. L’avantage
de cette association est de rendre l’ensemble moins sensible aux variations de
température car les tensions mécaniques sont alors en opposition et se
contrarient. Chaque face de ces deux plaquettes est recouverte d’une mince
couche d’argent qui recueille les charges. Les électrodes sont également en
argent. L’une est reliée aux deux faces externes de l’ensemble, l’autre est
l’électrode centrale et recueille les charges présentes sur les deux faces
internes.
La pression engendrée par
les ultrasons fait se déformer le transducteur, ce qui crée aux bornes des deux
électrodes, une tension proportionnelle à l’amplitude de la déformation.
Pour donner une idée plus
précise de la technologie du système, signalons que les deux lames de céramique
piézo-électrique ont une surface d’environ 1 cm carré et une épaisseur de 0,7
mm.
Ce type de transducteur
piézo-électrique, par rapport au transducteur électrostatique, a la
particularité de réagir à une bande très étroite (34 à 37 KHz), ce qui le rend
beaucoup moins sujet aux signaux parasites.
B)
Transducteurs
à infrarouges
Les rayons infrarouges sont
des rayonnements électromagnétiques tout comme les ondes radio ou les rayons X
par exemple.
La (figure 6) donne le
tableau des fréquences occupées par les différentes sortes d’ondes
électromagnétiques y compris bien sur, les rayons infrarouges. On y remarque,
dans l’ordre :
{kind=link}
·
Les ondes
radio (grandes ondes, petites ondes, ondes courtes) dont la longueur d’onde
commence aux alentours de deux kilomètres
·
La bande I
utilisée en télévision
·
La bande II
réservée aux émissions radio en modulation de fréquence
·
Les bandes VHF
III et UHF IV et V utilisées en télévision
·
Les
infrarouges
·
La lumière
visible
·
Les rayons
ultraviolets
·
Les rayons X
·
Les rayons y
émis par les substances radio actives et dont la longueur d’onde est de l’ordre
de 10 – 13 mètres
Cette liste n’est pas
exhaustive et pourrait être complétée mais elle a été volontairement simplifiée
de façon à bien faire ressortir la bande spectrale qui nous intéresse et dont
la longueur d’onde est comprise entre 1 micromètre (![]() mètres) et 760 nanomètres (760 x
mètres) et 760 nanomètres (760 x ![]() mètres).
mètres).
1)
Emetteurs
infrarouges
Ce sont des diodes
électroluminescentes (LED) d’un type particulier puisqu’elles sont constituées
d’un monocristal d’arséniure de Gallium dont on dope une zone par diffusion
d’un élément tel que le zinc. On obtient ainsi une jonction PN entre la partie
dopée et le cristal.
Cette jonction est ensuite
enfermée dans un boîtier cylindrique en plastique ou métallique ayant sur sa
partie supérieure une petite fenêtre munie d’un verre plat ou d’une lentille de
forme hémisphérique.
En polarisant en direct ce
type de diode luminescente, les électrons de la zone N sont injectés dans la
zone P et se recombinent avec les trous. Cette recombinaison est fortement exo
énergétique sous forme de rayons infrarouges invisibles pour l’œil humain.
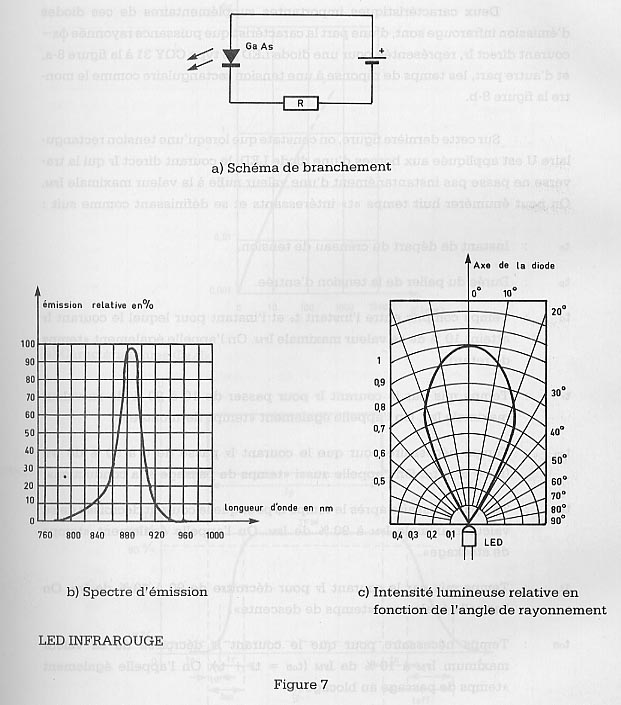
La (figure 7) donne le
schéma de principe d’emploi d’une telle diode, la courbe correspondante
d’émission spectrale et le diagramme de rayonnement dans un plan.
{kind=link}
Comme on peut le constater
sur la (figure 7 b) , l’émission maximale correspond à
une longueur d’onde de 890 mm qui se situe en plein milieu du spectre
infrarouge.
Sur la (figure 7 c) , on peut constater que le diagramme de rayonnement est en
forme de lobe avec une direction privilégiée, l’axe de la diode, pour laquelle
l’intensité lumineuse émise est maximum. Plus on s’écarte de cet axe, plus
l’intensité diminue pour devenir nulle pour une direction perpendiculaire à cet
axe.
Deux caractéristiques
importantes supplémentaires de ces diodes d’émission infrarouge sont, d’une
part la caractéristique puissance rayonnée
fE – courant
direct IF, représentée pour une diode LED de type CQY 31 à la (figure 8 a) , et d’autre part, les temps de réponse à une tension
rectangulaire comme le montre la (figure 8 b) .
{kind=link}
Sur cette dernière figure,
on constate que lorsqu’une tension rectangulaire U est appliquée aux bornes
d’une diode LED, le courant direct IF qui la traverse ne passe pas
instantanément d’une valeur nulle à la valeur maximale IFM. On peut énumérer
huit temps t intéressants et se définissants comme suit :
-
t0 :
Instant de départ du créneau de tension
-
tp :
Durée du palier de la tension d’entrée
-
td :
Temps compris entre l’instant t0 et l’instant pour lequel le courant IF atteint
10% de sa valeur maximale IFM. On l’appelle également temps de retard
-
tr :
Temps mis par le courant IF pour passer de 10 à 90% de sa valeur maximale IFM.
On l’appelle également temps de montée
-
ton :
Temps nécessaire pour que le courant IF passe de 0 à 90% de IFM (ton = td +
tr). On l’appelle aussi temps de passage à la conduction
-
ts :
Temps nécessaire après le temps tp pour que le courant décroisse de sa valeur
maximale IFM à 90% de IFM. On l’appelle également temps de stockage
-
tf :
Temps mis par le courant IF pour décroître de 90 à 10% de IFM. On l’appelle également
temps de descente
-
toff :
Temps nécessaire pour que le courant IF décroisse de sa valeur maximum IFM à
10% de IFM (toff= ts + tf). On l’appelle également temps de passage au blocage.
Les deux temps les plus
importants sont le temps de montée tr et le temps de descente tf. Il est
évident que plus ces temps seront courts, meilleure sera la diode et plus on
pourra l’utiliser avec des fréquences élevées de commutation de la tension U.
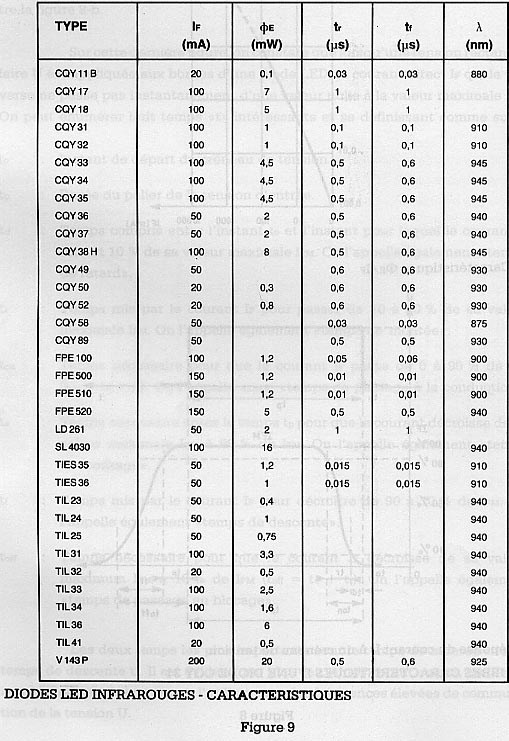
A titre indicatif, le
tableau de la (figure 9) donne les principales caractéristiques (courant direct
IF, puissance rayonnée
fE pour un
courant direct nominal, temps de montée tr, temps de descente tf et longueur d’onde ![]() de la lumière émise)
de plusieurs diodes LED émettrices de rayons infrarouges.
de la lumière émise)
de plusieurs diodes LED émettrices de rayons infrarouges.
{kind=link}
2)
Récepteurs
infrarouges
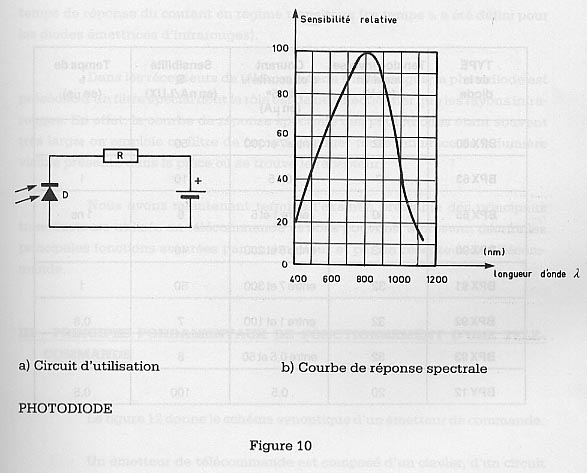
La réception des rayons
infrarouges peut être réalisée au moyen d’une photodiode ordinaire. Une
photodiode est de structure analogue à une diode ordinaire mais le boîtier est
muni d’une petite loupe de verre ou de plastique qui a pour rôle de concentrer
la lumière incidente et donc également les rayons infrarouges éventuels sur la
zone sensible de la jonction PN. La photodiode est alors polarisée en inverse
comme le montre la (figure 10 a) .
{kind=link}
Ainsi, la cathode étant plus
positive que l’anode, il ne circule dans la diode qu’un courant inverse, très
faible, constitué par les porteurs minoritaires. En d’autres termes, la
jonction PN présente une résistance élevée.
Lorsque la surface sensible
de la photodiode est frappée par la lumière, il se produit, dans les deux zones
N et P de la diode, une augmentation sensible des porteurs minoritaires et donc
du courant inverse qu’ils engendrent. Plus la lumière reçue est intense, plus
la résistance électrique de la jonction diminue.
A la (figure 10 b) , est représentée la courbe de réponse spectrale d’une
photodiode type. Comme on peut l’observer, celle ci est très large puisqu’elle
s’étend de 400 à 1100 nanomètres environ et présente un maximum de sensibilité
pour une longueur d’onde de 800 nanomètres de la lumière reçue.
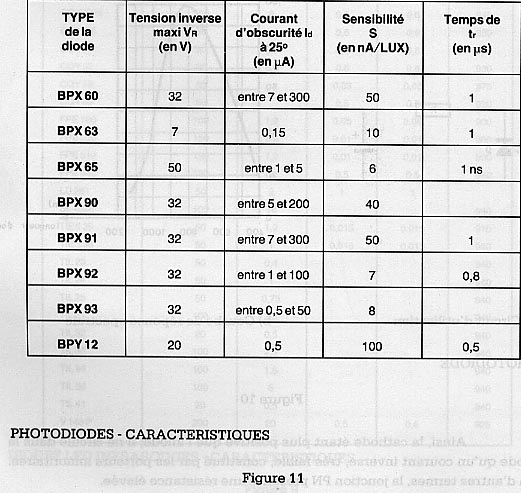
A titre indicatif, la
(figure 11) donne les principales caractéristiques de quelques photodiodes.
Dans ce tableau sont mentionnés :
{kind=link}
-
La tension VR
qui est la tension inverse maximale tolérée par la jonction
-
Le courant
d’obscurité Id qui est le courant inverse mesuré à une température ambiante de
25° Celsius pour une photodiode placée dans une obscurité complète
-
La sensibilité
S qui donne l’augmentation du courant inverse Id (en nanoampères) en fonction
de l’éclairement de la diode, exprimé en Lux.
-
Le temps de
montée tr exprimé en microsecondes qui exprime le temps de réponse du courant
en régime transitoire (ce temps tr a été défini pour les diodes émettrices
d’infrarouges)
Dans les récepteurs de
télécommande à infrarouges, la photodiode est précédée d’un filtre spécial dont
le rôle est de ne sélectionner que les rayons infrarouges. En effet, la courbe
de réponse spectrale des photodiodes étant souvent très large, on emploie ce
filtre de façon à éliminer toute influence de la lumière visible présente dans
la pièce où se trouve le récepteur.
III –
Principes fondamentaux de fonctionnement d’une télécommande
La (figure 12) donne le
schéma synoptique d’un émetteur de télécommande.
{kind=link}
Un émetteur de télécommande
est composé d’un clavier, d’un circuit électronique et du transducteur qui
génère soit des ultrasons, soit des infrarouges, le tout étant alimenté par une
pile.
Le clavier muni d’un certain
nombre de touches, constitue l’intermédiaire entre l’utilisateur et le système
électronique de l’émetteur.
La partie électronique est
généralement constituée d’un ou deux circuits intégrés, de structure interne
assez complexe, et alimenté par une pile de 6 ou 9 volts.
Ces circuits ont pour rôle
de générer des signaux de fréquence et de structure différentes selon la
commande sur laquelle on désire agir. Ainsi, lorsque l’on appuie sur une des
touches du clavier, le transducteur est excité et émet un signal qui est perçu
par le transducteur du récepteur et peut ensuite agir sur le réglage désiré.
Tous ces circuits sont
enfermés dans un boîtier de dimensions et de formes assez semblables à celles
d’une calculatrice de poche comme le montre la (figure 13) .
{kind=link}
La télécommande représentée
comporte seize touches de sélection de programmes (certaines en comportent plus
ou moins selon le téléviseur). Les commandes relatives au volume sonore (V), à
la luminosité (L), au contraste (C) et à la saturation (S), nécessitent chacune
deux touches, l’une marquée du signe +, l’autre du signe – pour permettre respectivement
d’augmenter ou de diminuer le niveau de chacun des réglages. La valeur moyenne
de tous ces réglages peut être réobtenue immédiatement par pression sur la
touche valeur moyenne (figure 13) .
La touche coupure du son
(figure 13) sert à couper le son puis à le remettre en service au même niveau
qu’il se trouvait avant coupure. La touche marquée I (figure 13) permet
d’afficher temporairement le numéro du programme suivi sur l’écran du
téléviseur au moyen de LED. La touche R (figure 13) sert à la recherche
automatique de l’émetteur alors que la touche 0 (figure 13) permet d’arrêter le
téléviseur.
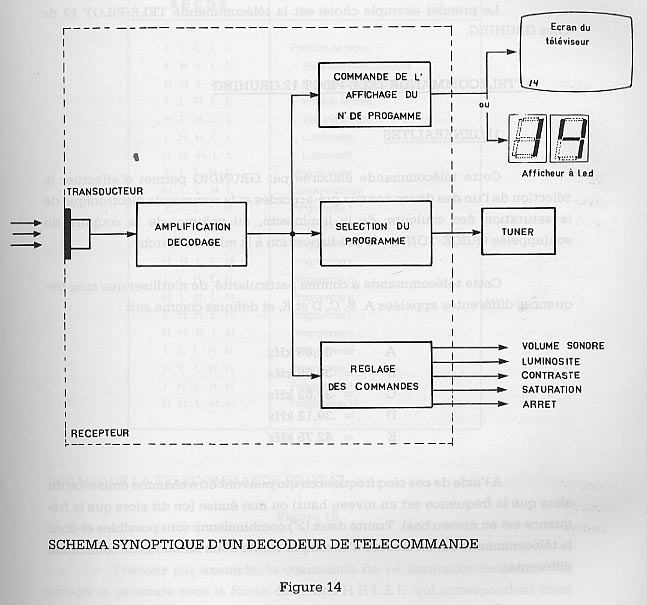
Les signaux de commande émis
par l’émetteur sont captés par le transducteur récepteur monté sur le
téléviseur, puis sont amplifiés et décodés comme le montre le schéma synoptique
d’un décodeur représenté (figure 14) .
{kind=link}
A la sortie de ce décodeur,
on obtient les différentes tensions continues nécessaires aux réglages du
téléviseur (volume, luminosité, contraste et saturation), ainsi que les
impulsions permettant d’arrêter le téléviseur.
On obtient également la
tension pour l’affichage du canal reçu (soit par surimpression sur l’écran,
soit par affichage au moyen de LED), et les tensions pour la commande du
sélecteur de canaux VHF / UHF, que la tension d’accord provienne de
potentiomètres préréglés ou de mémoires électroniques.
IV –
Télécommandes à ultrasons
A)
Télécommande
TELE-PILOT 12 GRUNDIG
1)
Généralités
Cette télécommande élaborée
par GRUNDIG permet d’effectuer la sélection de l’un des douze canaux pré
accordés
et la commande électronique de la saturation des couleurs, de la luminosité, du
volume, de la coupure du son et de prédisposition à la mise en marche. Cette
télécommande a comme particularité, de n’utiliser que cinq fréquences
différentes appelées A, B, C, D et E et définies comme suit :
A =
34,69 kHz
B =
36,05 kHz
C =
37,52 kHz
D =
39,12 kHz
E =
42,75 kHz
A l’aide de ces cinq
fréquences qui peuvent être chacune émise ou non émise. Trente deux (![]() ) combinaisons sont possibles et donc la télécommande est en
mesure d’accomplir trente deux fonctions de commande différentes.
) combinaisons sont possibles et donc la télécommande est en
mesure d’accomplir trente deux fonctions de commande différentes.
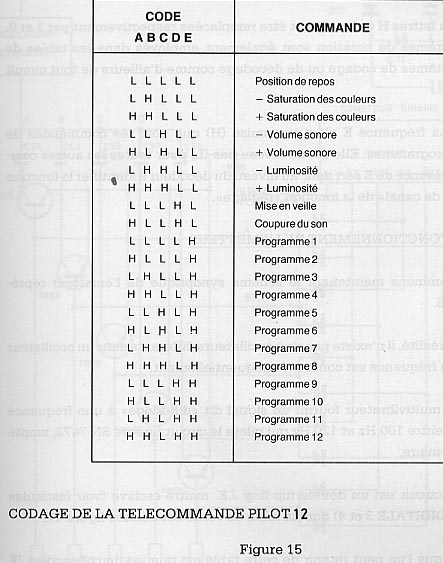
Toutes ne sont pas utilisées
comme le montre la (figure 15) qui donne le codage ABCDE de chaque commande.
Comme on le voit, à chaque commande correspond une séquence de 5 bits.
Rappelons que le bit, unité d’information binaire, exprime le choix dans une
alternative : ici, il s’agit de la présence (niveau haut symbolisé par la
lettre H : HIGH = haut) ou de l’absence (niveau bas symbolisé pat la lettre
L : LOW = bas) de la fréquence en cause.
{kind=link}
Prenons par exemple, la
commande de + saturation couleurs : le codage se présente sous la forme
des 5 bits H H L L L qui correspondent donc aux conditions suivantes :
-
Présence de la
fréquence A
-
Présence de la
fréquence B
-
Absence de la
fréquence C
-
Absence de la
fréquence D
-
Absence de la
fréquence E
Les lettres H et L peuvent
être remplacées respectivement par 1 et 0. Ces deux systèmes de notation sont
également employés dans les tables de vérité des systèmes de codage ou de
décodage comme d’ailleurs de tout circuit logique.
La fréquence E n’est
transmise (H) que pour les commandes de sélection de programmes. Elle est au
niveau bas (L) pour toutes les autres commandes. La présence de E sert donc au
niveau du décodeur à identifier la fonction changement de canal de la fonction
réglage.
2)
Fonctionnement
de l’émetteur
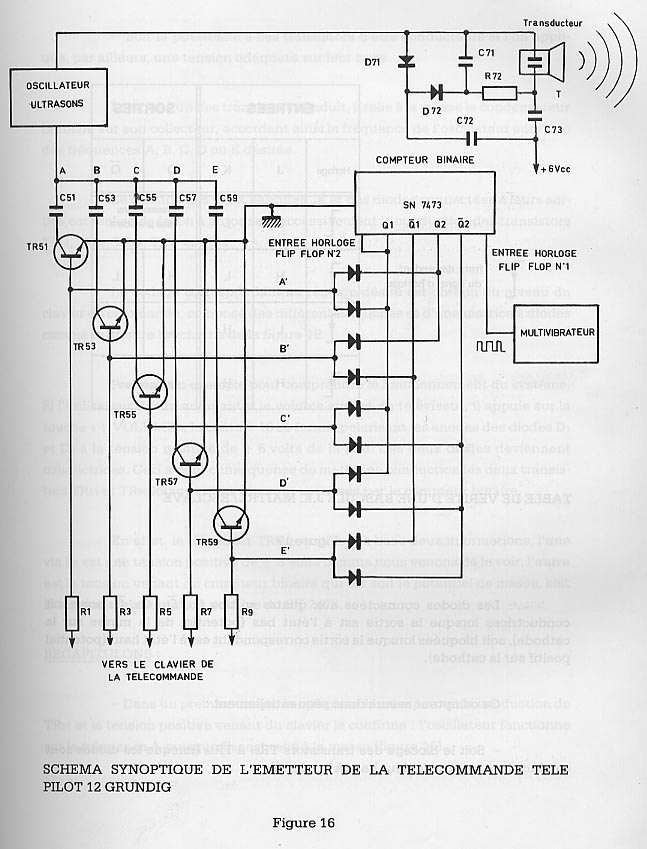
Examinons maintenant le
schéma synoptique de l’émetteur représenté (figure 16)
.
{kind=link}
En réalité, il n’existe pas
cinq oscillateurs différents mais un oscillateur unique dont la fréquence est
commutée séquentiellement.
Un multivibrateur fournit un
signal dit d’horloge à une fréquence fixe comprise entre 100 et 120 Hz qui
pilote le circuit intégré SN 7473, monté en compteur binaire.
Ce circuit intégré est un
double flip-flop JK maître esclave dont la table de vérité est donnée
(figure
17) .
{kind=link}
Ce que l’on peut retenir de
cette table de vérité est que les deux bascules JK réagissent au front
descendant du signal appliqué sur leur entrée horloge, selon les états des
entrées, il en résulte un état précis des sorties figurant dans cette table.
Signalons que la bascule JK
n°1 reçoit sur son entrée horloge, le signal issu du multivibrateur et que la
bascule JK n°2 reçoit sur son entrée horloge, le signal venant de la sortie Q1
de la bascule JK n°1.
Les diodes connectées aux
quatre sorties Q1, ![]() , Q2,
, Q2, ![]() sont soit conductrices
lorsque la sortie est à l’état bas (potentiel de la masse sur la cathode), soit
bloquées lorsque la sortie correspondant est à l’état haut (potentiel positif
sur la cathode). Ce compteur assure donc séquentiellement :
sont soit conductrices
lorsque la sortie est à l’état bas (potentiel de la masse sur la cathode), soit
bloquées lorsque la sortie correspondant est à l’état haut (potentiel positif
sur la cathode). Ce compteur assure donc séquentiellement :
-
Soit le
blocage des transistors TR51 à TR59 (lorsque les diodes sont conductrices, ce
qui met leur base à la masse).
-
Soit la
possibilité à ces transistors d’être conducteurs si l’on applique, par
ailleurs, une tension adéquate sur leur base.
Lorsque l’un des transistors
conduit, il relie à la masse le condensateur branché sur son collecteur,
accordant ainsi la fréquence de l’oscillateur sur l’une des fréquences A, B, C,
D ou E désirée.
Le câblage des deux bascules
JK et des diodes connectées à leurs sorties est réalisé de façon à autoriser
successivement la conduction des transistors TR51, TR53, TR55 et TR59.
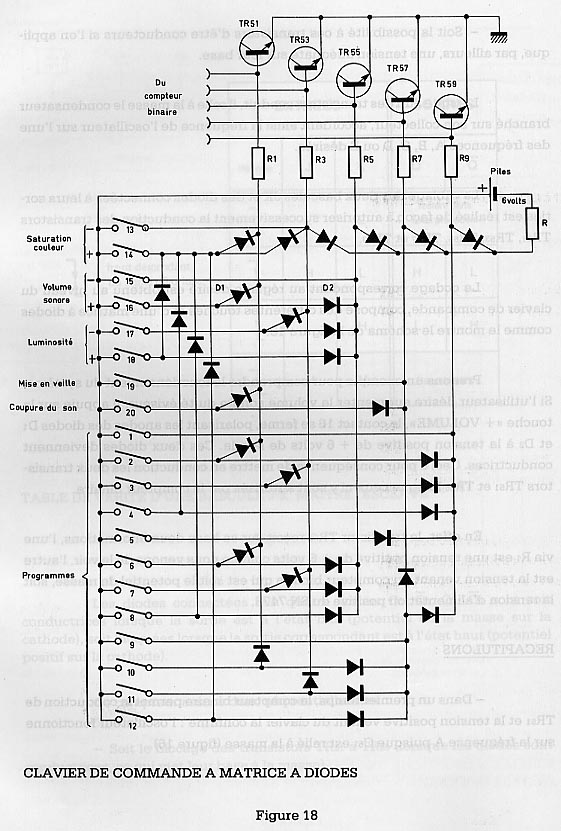
Le codage correspondant au
réglage désiré est obtenu au niveau du
clavier de commande, composé des différentes touches et d’une matrice à
diodes comme le montre le schéma de la (figure 18) .
{kind=link}
Prenons un exemple pour
comprendre le fonctionnement du système. Si l’utilisateur désire augmenter le
volume sonore du téléviseur, il appuie sur la touche + volume, le contact 16 se
ferme, polarisant les anodes des diodes D1 et D2 à la tension positive de + 6
volts de la pile. Ces deux diodes deviennent conductrices. Ceci a pour
conséquence de mettre en conduction les deux transistors TR51 et TR55 lorsque
ceux ci sont autorisés par le compteur binaire.
En effet, le transistor Tr51
reçoit sur sa base deux informations, l’une via R1 est une tension positive de
+ 6 volts comme nous venons de le voir, l’autre est la tension venant du
compteur binaire qui est soit le potentiel de masse, soit la tension
d’alimentation positive du SN 7473.
Récapitulons :
·
Dans un
premier temps, le compteur binaire permet la conduction de TR51 et la tension
positive venant du clavier la confirme : l’oscillateur fonctionne sur la
fréquence A puisque C51 est relié à la masse (figure 16) .
·
Dans un second
temps, le compteur binaire permet la conduction du transistor TR53 mais aucune
tension positive ne vient du clavier sur la base de ce transistor. Il reste
donc bloqué et l’oscillateur ne fonctionne pas à la fréquence B.
·
Dans un
troisième temps, le compteur permet la conduction de TR55 et la tension
positive venant du clavier confirme cette conduction. L’oscillateur fonctionne
à la fréquence C puisque le condensateur C55 est relié à la masse.
·
Dans un
quatrième temps, le compteur permet la conduction de TR57, mais aucune tension
n’arrivant du clavier, celui ci reste bloqué et l’oscillateur ne fonctionne
pas. Il n’y a pas d’oscillations à la fréquence D.
·
Dans un
cinquième temps, le compteur permet la conduction de TR59 mais comme aucune
tension n’arrive du clavier, le transistor reste bloqué et il n’y a pas
d’oscillations à la fréquence E.
Ensuite le cycle que nous
venons de voir se reproduit tant que la pression sur la touche + volume est
maintenue.
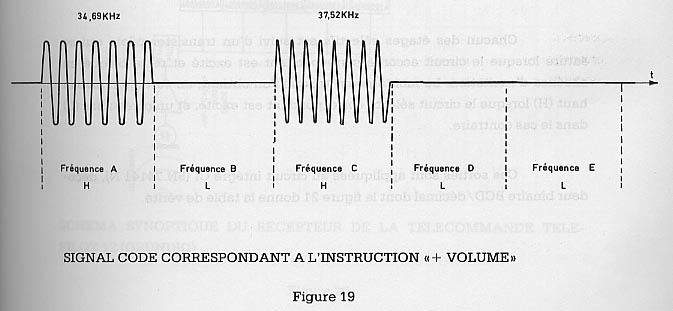
La (figure 19) donne
l’aspect du signal produit par l’oscillateur et qui correspond bien au codage
de la fonction + volume tel qui a été défini dans la (figure 15) (H L H L L).
{kind=link}
Ce signal est ensuite
appliqué au transducteur électrostatique T qui émet ces ultrasons en direction
du récepteur.
La tension continue
nécessaire à la polarisation du haut parleur électrostatique (environ 250
volts) est obtenue par le circuit doubleur de tension composé des diodes D71 et
D72 et les condensateurs C71 et C72 et alimenté par le signal sinusoïdal
produit par l’oscillateur (figure 16) .
3)
Fonctionnement
du récepteur
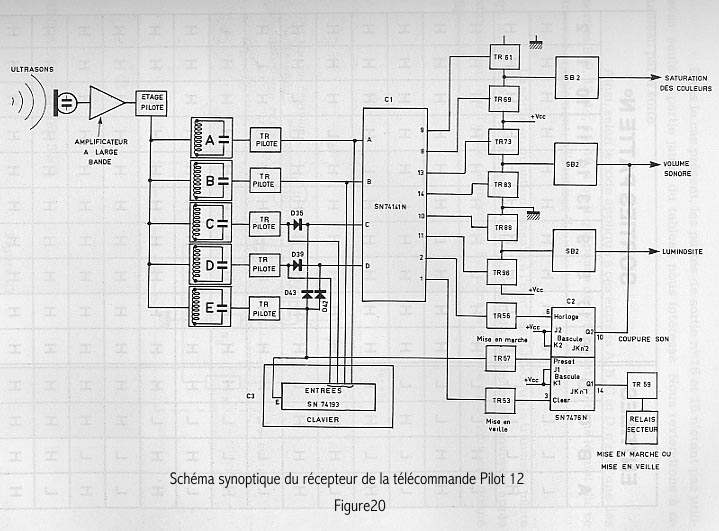
La (figure 20) donne le
schéma synoptique du récepteur de cette télécommande TELE-PILOT 12.
{kind=link}
Les signaux ultrasoniques
émis par l’émetteur sont captés par le microphone électrostatique du récepteur
et convertis en signaux électriques. Ces signaux passent, tout d’abord, dans un
amplificateur à large bande puis dans un étage pilote qui attaque cinq circuits
sélectifs, accordés chacun sur l’une des fréquences A, B, C, D et E.
Chacun des étages sélectifs
est suivi d’un transistor pilote qui se sature lorsque le circuit accordé
correspondant est excité et reste bloqué en absence d’excitation. Le montage
est tel que l’on obtient, en sortie, un niveau haut (H) lorsque le circuit
sélectif correspondant est excité, et un niveau bas (L) dans le cas contraire.
Ces sorties sont appliquées
au circuit intégré C (SN 74141 N), décodeur binaire BCD / décimal dont la
(figure 21) donne la table de vérité.
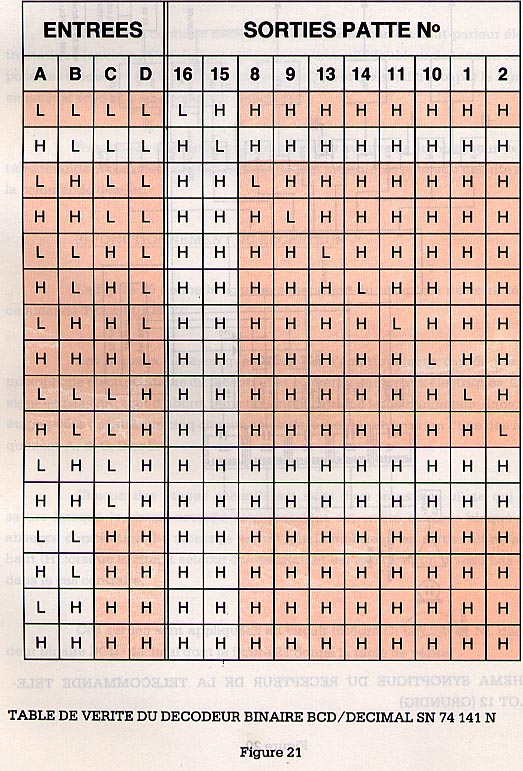{kind=link}
Dans le cas présent, les
pattes de sortie n°16 et 15 n’étant pas utilisées, seule la partie marron clair
du tableau nous intéresse. Nous reviendrons à ce tableau par la suite.
Ainsi, selon le code
appliqué à ces entrées A, B, C et D, c’est l’une des sorties 8, 9, 13, 14, 11,
10, 1 et 2 qui passe de l’état haut (H) dans lequel elle se trouve normalement,
à l’état bas (L).
La sortie en question
passant à l’état bas (L) bloque le transistor pilote qui lui est relié. La
tension positive de collecteur du transistor est envoyée, après stabilisation,
sur l’unité de mémoire SB2 dont le schéma électrique est donné
(figure 22) .
{kind=link}
Prenons un exemple concret
pour examiner comment fonctionne toute cette chaîne. L’utilisateur désire
augmenter la saturation des couleurs :
En actionnant la touche +
saturation de l’émetteur, un signal codé sous la forme H H L L L est capté par
le récepteur. Les circuits accordés A et B sont excités et les entrées A et B
du décodeur C1 sont à l’état haut (H) alors que les entrées C et D sont à
l’état bas (L).
Si on consulte le tableau de
la (figure 21) , on voit que cet état des entrées
correspond au passage du niveau haut au niveau bas pour la sortie n°9.
Ce passage au niveau bas
provoque le blocage du transistor TR61 (figure 20) .
Comme TR69 est saturé, une
tension positive est appliquée à la mémoire SB2, qui amorce le petit tube néon
L (figure 22) et charge le condensateur C connecté entre grille G du transistor
MOS FET T et la masse.
Sur la source S de ce même
transistor, on obtient ainsi une tension continue qui augmente aussi longtemps
(dans une certaine plage) que la pression sur la touche est maintenue et donc
que la sortie n°9 de C1 est au niveau bas. Cette tension continue croissante est
envoyée à l’endroit voulu du téléviseur pour augmenter la saturation des
couleurs de l’image.
Lorsque l’on relâche la
touche, le néon L se désamorce et la charge de C, donc la tension de sortie de
la mémoire, reste constante maintenant le téléviseur au réglage effectué
auparavant.
Si l’on actionne, au
contraire, la touche – saturation, les états L, H, L et L sont appliqués
respectivement aux entrées A, B, C et D du circuit intégré C1. La sortie n°8 de
C1 passe à l’état bas, le transistor TR69 se bloque alors que TR61 relié à la
masse est saturé.
Le néon L s’amorce car la
différence de potentiel à ses bornes est suffisante et le condensateur C se
décharge progressivement à la masse. La tension de sortie de la mémoire diminue
et la saturation des couleurs de l’image diminue proportionnellement.
Ce raisonnement est
similaire pour les réglages de luminosité et de volume sonore.
Lorsque la touche mise en
veille est actionnée, seule la fréquence D est générée et la sortie n°1 du
circuit décodeur C1 passe à l’état bas, bloquant le transistor TR53. Un niveau
bas est donc appliqué à l’entrée CLEAR (= remise à zéro de la sortie Q) de la
bascule JK n°1 du circuit intégré C2 (SN 7476 N) qui en comprend deux. La
sortie Q1 (broche 14) passe donc à l’état bas également (puisque l’entrée CLEAR
d’une bascule JK commute la sortie Q à l’état bas lorsqu’on lui applique un
niveau bas), et le transistor TR59, dans le circuit de collecteur duquel se
trouve le relais de commande de la tension secteur alimentant le téléviseur, se
bloque mettant le téléviseur en position de veille : celui ci s’arrête et
seul le décodeur de télécommande reste alimenté de façon à ce que l’utilisateur
puisse rallumer son téléviseur à distance en appuyant sur l’une des touches 1 à
12 de programme.
Lorsque la touche coupure
son est actionnée (code H L L H L), la sortie n°2 de C1 passe à l’état bas et
bloque le transistor TR56. L’entrée horloge du flip-flop n°2 de C2 passe de
l’état H à l’état L. La sortie Q2 de cette bascule change d’état et passe de même
à l’état L. Cette sortie commande l’amplificateur FI SON du téléviseur et coupe
donc le son.
En appuyant une nouvelle
fois sur la touche coupure son de l’émetteur, le transistor TR56 se re bloque à
nouveau créant un front descendant de tension sur l’entrée horloge de ce
flip-flop n°2. La sortie Q commute à nouveau et repasse à l’état H, ce qui a
pour effet de rétablir le son du téléviseur.
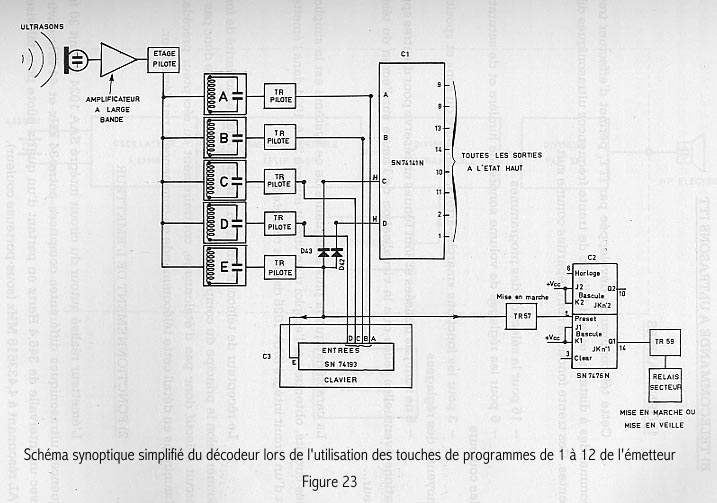
Il reste à examiner le fonctionnement des touches
correspondant au choix de programmes 1 à 12. Le codage de ces touches a la
particularité de contenir le signal E (42,75 KHz) dans tous les cas
(figure 15) .
Le circuit sélectif E de la
(figure 20) , est donc excité quelle que soit la
touche de programme actionnée. Le transistor pilote correspondant se met en
conduction, le niveau H se forme sur son collecteur et, à travers les diodes
D42 et D43, met les entrées C et D du circuit intégré C1 à l’état H. Les diodes
D35 et D39 sont bloquées et évitent le retour de ce niveau H sur les
transistors pilotes des circuits sélectifs C et D.
Les entrées C et D du
circuit étant toutes deux au niveau haut H, on en déduit, d’après le tableau de
la (figure 21) que, quels que soient les états des entrées A et B, toutes les
sorties du circuit intégré C1 sont à l’état haut H, et donc inactives.
L’état de sortie des
transistors pilote affectés aux circuits sélectifs A, B, C et D n’influence
donc pas le circuit intégré C1 mais sert à piloter le circuit intégré C3 SN 74
193 (compteur / décompteur binaire) dont le rôle est de sélectionner le
programme désiré en fonction du code appliqué à ses quatre entrées A, B, C et
D.
La (figure 23) donne le
schéma synoptique simplifié du décodeur lors de l’utilisation des touches de
programmes 1 à 12 de l’émetteur.
{kind=link}
Ces signaux ne sont acceptés
par C3 que lorsque l’entrée est à l’état H, ce qui est bien le cas lors des
changements de chaînes puisque le circuit sélectif E est excité.
Cet état H est également
envoyé via TR57 sur l’entrée PRESET (broche 2) de la bascule JK n°1 du circuit
C2.
La sortie Q1 de ce flip-flop
passe à l’état haut, commutant le relais secteur et mettant le téléviseur en
marche s’il était en veille, ou le maintient en fonctionnement s’il s’y
trouvait déjà.
B)
Télécommande
à ultrasons ITT
1)
Généralités
Cette télécommande
développée par ITT, permet d’effectuer trente commandes à distance et ceci à
l’aide de trente fréquences ultrasoniques différentes. Ces trente fonctions
sont réparties comme suit :
·
16 pour la
sélection des programmes
·
6 pour les
réglages de volume sonore, de lumière et de saturation des couleurs
·
3 pour les
fonctions marche arrêt, coupure du son et position moyenne des réglages
·
5 ne sont pas
utilisées et sont tenues en réserve pour d’autres applications éventuelles
telles que la visualisation de l’heure sur l’écran du téléviseur…
La caractéristique la plus
marquante de ce système est la simplicité des circuits selon le principe du
comptage de fréquence et ne nécessite donc pas de circuit sélectif donc pas
d’étalonnage, contrairement au récepteur précédent.
2)
Fonctionnement
de l’émetteur
L’émetteur réalisé autour du
circuit intégré SAA 1024 fournit 30 fréquences ultrasoniques différentes
comprises entre 34 et 44 KHz environ avec un intervalle de 346,4 Hertz en
partant d’un quartz pilote pour téléviseur PAL résonnant à 4,433618 MHz (sous
porteuse couleur).
La (figure 24) donne le
schéma synoptique interne du circuit intégré SAA 1024.
{kind=link}
Ce circuit est donc
constitué d’un oscillateur à 4,43 MHz, piloté par un quartz externe, suivi
d’une bascule bistable (flip-flop), d’un diviseur programmable et d’un diviseur
fixe. Le diviseur programmable est commandé par un décodeur également intégré
qui reçoit les informations venant du clavier de commande.
La fréquence de 4,433618 MHz
produite par l’oscillateur est divisée par deux dans le flip-flop et passe donc
à 2,216809 MHz.
Ce signal passe ensuite dans
le diviseur programmable dont le rapport de division R est donné par la
formule :
R = ![]()
Dans laquelle n est un
nombre entier compris entre 1 et 30 et qui est imposé par le décodeur selon le
code qu’il reçoit lui même du clavier de commande.
Ainsi, à la sortie du
diviseur programmable et selon la valeur de n, on obtient une fréquence
comprise entre 1697 et 2200 KHz environ. Le tableau de la (figure 25) donne, à
titre indicatif, les fréquences obtenues en fonction de n.
{kind=link}
La fréquence obtenue à la
sortie du diviseur programmable est à nouveau divisée par le diviseur par 50 et
en sortie du circuit SAA 1024, on obtient donc 30 fréquences différentes
possibles (selon la valeur de n), comprises entre 34 kHz et 44 kHz environ et
donc se trouvant dans la bande des ultrasons.
Le tableau de la (figure 26)
récapitule les trente fréquences ultrasoniques obtenues à la sortie de
l’émetteur et correspondant chacune à une opération bien précise au niveau du
téléviseur.
{kind=link}
La (figure 27) donne le
schéma simplifié de l’ensemble de cet émetteur de télécommande.
{kind=link}
Le clavier de commande
utilise une matrice à diodes de même type que celle examinée précédemment.
Lorsque l’une des touches est enfoncée, deux entrées du circuit intégré sont
activées. L’une (entrée a, b, c , d ou e) correspond à
la colonne dans laquelle se trouve la touche, l’autre (entrée f, g, h, i, k ou
l) à la ligne dans laquelle se place cette même touche. Ainsi, à chaque touche
correspond un code d’entrée différent sur le circuit intégré. Le décodeur
contenu dans ce circuit reçoit les informations et détermine ainsi le rapport R
de division de fréquence du diviseur programmable, comme nous l’avons vu
précédemment.
A noter qu’avant d’arriver
au circuit SAA 1024, les informations passent par des circuits d’entrée
constitués de cellules RC dont le rôle est d’éliminer d’éventuelles impulsions
parasites.
En sortie du circuit intégré
(broche 15), le signal ultrasonique est envoyé à travers la résistance R2 sur
la base du transistor T1 qui pilote le haut parleur électrostatique.
La bobine L, reliée au
collecteur de T1, est montée en autotransformateur, ce qui permet d’obtenir, à
ses bornes (points A et E), une tension sinusoïdale d’environ deux cents volts
crête à crête.
La diode D opère un
redressement simple alternance de cette tension qui charge le condensateur C3.
La tension continue obtenue sert à polariser le transducteur électrostatique
qui peut donc émettre les ultrasons en direction du récepteur de la
télécommande.
Cet émetteur ne consomme du
courant que pendant la transmission des signaux de commande. Au repos, sa
consommation est inférieure à 10 microampères.
Il peut donc rester en
permanence sous tension car une telle consommation est négligeable, compte tenu
de la durée moyenne de vie de la pile 9 volts employée.
Ce résultat intéressant est
du à l’adoption de la technologie C / MOS pour la réalisation du circuit
intégré SAA 1024. Ceci permet également d’avoir une valeur de la tension
d’alimentation comprise indifféremment entre 7 et 9 volts.
3)
Fonctionnement
du récepteur
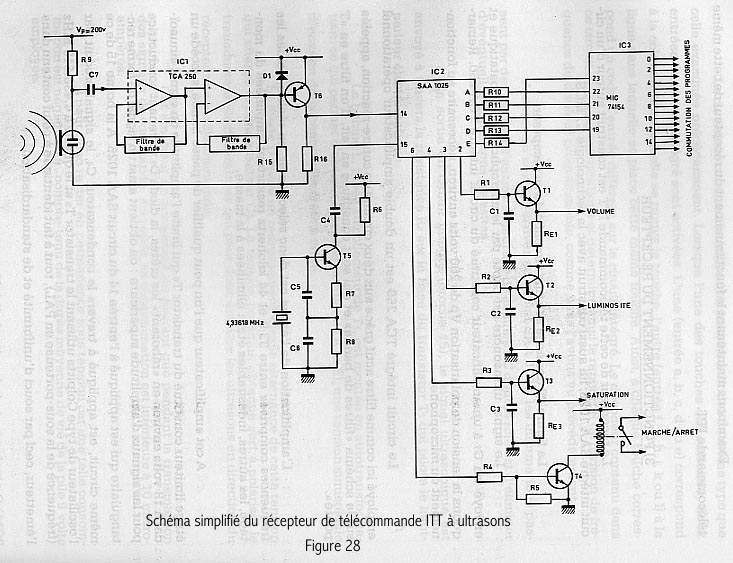
Le récepteur de cette
télécommande ITT est construit autour d’un circuit intégré SAA 1025, lui aussi
construit avec la technologie C / MOS. La (figure 28) donne le schéma simplifié
de ce récepteur.
{kind=link}
Le signal ultrasonore est
capté par le microphone électrostatique et envoyé via C7 à un amplificateur
constitué du circuit intégré TCA 250. Remarquons la tension de polarisation Vp
de 200 volts environ, nécessaire au fonctionnement du microphone.
Le circuit intégré TCA 250
est un double amplificateur opérationnel employé ici comme filtre actif grâce
aux deux circuits de contre réaction, appelés sur le schéma filtres de bandes
et qui sont constitués en fait, d’un filtre en T ponté.
L’amplification de l’étage
est donc sélective et, en réalité, seules les fréquences comprises entre 33,9
et 44 KHz ressortent amplifiées du montage, les autres indésirables étant
éliminées à la masse.
A cet amplificateur que l’on
peut qualifier de passe bande, succède un étage limiteur constitué du
transistor T6 qui limite l’amplitude du signal sinusoïdal à 18 volts environ en
rabotant les crêtes, la diode D1 devenant conductrice pour les signaux
d’amplitude supérieure : on obtient ainsi un signal de forme rectangulaire
qui est appliqué à l’entrée 14 du circuit SAA 1025. A la borne 15 de ce même
circuit, est appliqué à travers le condensateur C4, le signal produit par
l’oscillateur de type Colpitts utilisant le transistor T5 et le quartz à
4,433618 MHz (fréquence de la sous porteuse en PAL), tout à fait identique à
celui contenu dans l’émetteur, ceci par souci d’uniformité et de
standardisation.
Il est nécessaire, à
présent, de donner le schéma synoptique (figure 29) du circuit intégré SAA 1025
qui accomplit les fonctions principales dans le récepteur.
{kind=link}
Le signal à 4,43 MHz
arrivant sur la broche 15 de ce circuit passe dans une succession de diviseurs
qui, au bout du compte, divisent par 102 400 la fréquence du signal de
l’oscillateur. Le signal à 43,3 Hertz obtenu, sert de référence au compteur de
fréquence.
Celui ci compare le période
du signal ultrasonique entrant par la broche 14 du circuit intégré à la période
de 23,1 ms du signal de référence. Cette mesure est interprétée par le compteur
de commande qui délivre un code à cinq bits A, B, C, D et E différent pour
chaque fréquence ultrasonique et donc particulier à chaque commande désirée. Le
tableau de la (figure 30) donne, à titre indicatif, les codes correspondants à
chaque fonction.
{kind=link}
On remarque sur ce tableau
que D est à l’état bas lors des changements de programme et à l’état haut lors
des autres réglages, ceci permet d’effectuer une première sélection. Lorsque D
est à l’état haut, le convertisseur digital / analogique inclus dans ce circuit
intégré est en fonction et décode les informations E A B C présents sur ses
entrées.
S’il s’agit d’une demande de
réglage du volume, de la luminosité ou de la saturation, il apparaît sur la
broche 2, 3 ou 4, selon le cas, un signal rectangulaire pouvant prendre trente
valeurs différentes en fonction de la durée et du type de commande effectuée
sur l’émetteur.
Un circuit intégrateur R1
C1, R2 C2 ou R3 C3 (figure 28) transforme cette tension rectangulaire en
tension continue qui pilote la base d’un transistor (T1, T2 ou T3). Une tension
continue, image de l’amplitude du créneau sortant de C2 est donc recueillie aux
bornes de la résistance d’émetteur (RE1, RE2 ou RE3) de ce transistor pour être
envoyée au point adéquat du téléviseur permettant le réglage du volume, de la
luminosité ou de la saturation selon le cas.
Le convertisseur digital /
analogique peut recevoir également le code E A B C = H L H H correspondant à la
fonction marche arrêt (figure 30) . Dans ce cas, le
convertisseur commute une bascule bistable et la broche 6 du circuit SAA 1025
change d’état. Lorsque cette sortie 6 de C2 est à l’état haut, le transistor T4
conduit (figure 28) et enclenche le relais d’alimentation secteur du
téléviseur. Au contraire, quand cette sortie est à l’état bas, le transistor T4
est bloqué et le téléviseur n’est plus alimenté en dehors de la partie
récepteur de télécommande, afin de permettre sa remise en fonctionnement à
distance. C’est ce que l’on appelle la mise en veille, comme nous l’avons vu dans
la télécommande précédente.
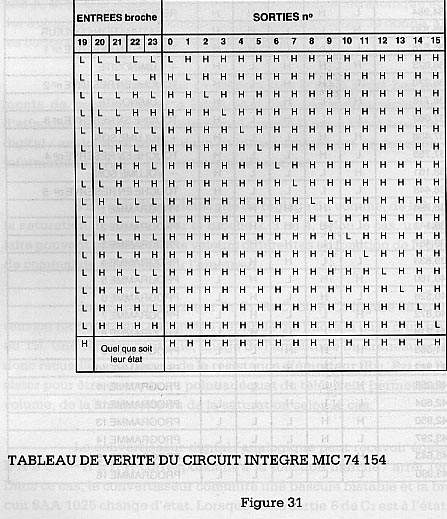
Sur la (figure 28) , on
remarque que les sorties A, B, C, D et E du SAA 1025 sont reliées
respectivement à travers les résistances R10 à R14, aux broches 22, 21, 20, 19
et 23 du circuit intégré C3 MIC 74 154 qui est un décodeur quatre entrées,
seize sorties dont la (figure 31) donne la table de vérité, c’est à dire l’état
des sorties 0 à 15 en fonction de l’état de chacune des cinq entrées (broches
19, 20, 21, 22 et 23).
{kind=link}
Ce tableau montre que l’une
des sorties 0 à 15 passe à l’état bas (L), alors que tous les autres sont à
l’état haut (H), pour un codage bien précis des entrées 20, 21, 22 et 23,
l’entrée 19 piloté par la sortie D du SAA 1025, devant être maintenue à l’état
bas.
En effet, des que la sortie
D du SAA 1025 passe à l’état haut, toutes les sorties du circuit MIC 74 154
sont bloquées à l’état haut. C’est le cas lorsque l’on veut agir sur les
différents réglages de volume, luminosité, saturation et la commande marche
arrêt et non plus sur la commutation des programmes.
Dans le cas d’un changement
de programme, l’une des seize sorties du circuit intégré C3 passe donc à l’état
bas et commute ainsi le téléviseur sur le programme désiré parmi les seize
possibles.
V –
Télécommandes à infrarouges
A)
Généralités
Ce type de télécommande
présente, par rapport à celles à ultrasons, un certain nombre d’avantages qui
sont les suivants :
·
Immunité
élevée aux parasites contrairement aux systèmes à ultrasons assez sensibles aux
bruits extérieurs arrivant dans certains cas, à produire de fausses commandes
·
Moindre taux
de distorsion du signal transmis
·
Moindre
consommation de l’étage de sortie de l’émetteur et suppression des tensions de
polarisation élevées nécessaires aux transducteurs électrostatiques
·
Absence de
l’effet Doppler créé par d’éventuels objets en mouvement dans la pièce, qui en
faisant changer les fréquences des ondes ultrasonores perçues par le récepteur,
faussent l’action de ce dernier
·
Absence de
sons agaçants perceptibles par les animaux domestiques
Tous ces avantages font que,
de nos jours, les télécommandes à infrarouges ont nettement supplanté les
systèmes à ultrasons.
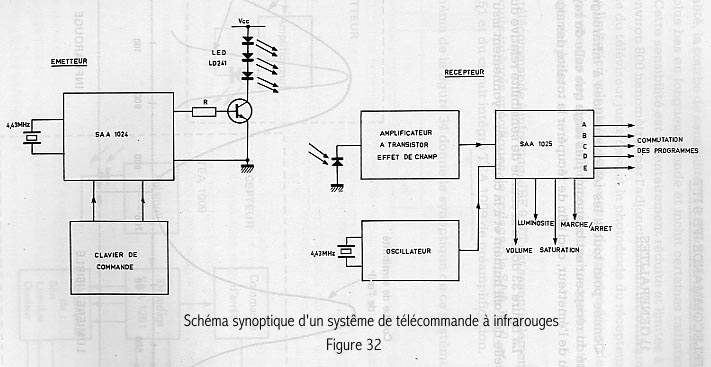
Les circuits intégrés
précédemment examinés restent tout à fait adaptés à ces télécommandes à
infrarouges comme l’illustre la (figure 32) montrant une de ces télécommandes
utilisant comme composants principaux un circuit intégré SAA 1024 (dans
l’émetteur) et un circuit intégré SAA 1025 (dans le récepteur) décrits
précédemment.
{kind=link}
Les principaux changements,
que l’on observe, sont au niveau de l’étage de sortie de l’émetteur et de
l’étage d’entrée du récepteur.
L’étage de sortie de
l’émetteur est constitué d’un transistor monté en émetteur commun et dont le
collecteur a pour charge trois diodes LED à l’Arséniure de Gallium qui émettent
les infrarouges.
On utilise très souvent
plusieurs diodes en série pour obtenir une puissance rayonnée en mesure de
garantir une distance opérationnelle de liaison d’une quinzaine de mètres.
Le récepteur comprend tout
d’abord la photodiode réceptrice, polarisée en inverse, qui transforme les
infrarouges reçus en signaux électriques. Ces signaux sont traités dans un
amplificateur à haute impédance d'entrée utilisant un transistor à effet de
champ. Ces signaux amplifiés attaquent ensuite le circuit SAA 1025 et le reste
du fonctionnement est tout à fait identique à celui examiné précédemment dans
la télécommande ITT à ultrasons.
Les solutions adoptées, dans
les circuits de télécommande à infrarouges sont très nombreuses. Il n’est pas
possible d’examiner tous les circuits utilisés. Nous allons voir en détail un
exemple choisi pour la sophistication et l’harmonie des solutions retenues et
utilisant des circuits intégrés élaborés par ITT.
B)
Télécommande
IFB 9 ITT
1)
Généralités
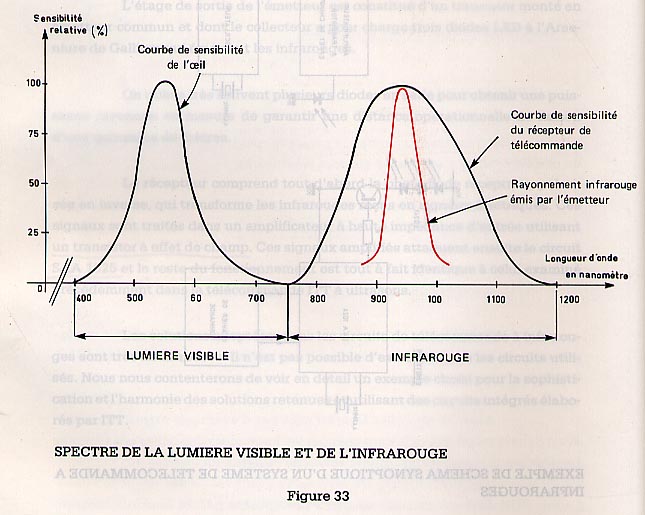
Comme pour toutes les
télécommandes à infrarouges, la courbe de sensibilité du récepteur est beaucoup
plus large que celle du rayonnement émis au niveau de l’émetteur, ceci afin de
récupérer la totalité des signaux.
La (figure 33) donne la
courbe de sensibilité relative du récepteur comparée à celle de l’œil humain et
à la courbe du rayonnement issu de l’émetteur.
{kind=link}
En réalité, la courbe de
sensibilité relative du récepteur lui même descend beaucoup plus bas en
longueur d’onde et inclut certaines radiations lumineuses visibles. Cette
sensibilité est volontairement réduite et limitée à une longueur d’onde
d’environ 800 nanomètres par l’adjonction d’un filtre infrarouge disposé sur la
façade du téléviseur juste devant la photodiode du récepteur de télécommande.
Cette limitation volontaire de la largeur du spectre des ondes reçues par la
photodiode évite que des signaux lumineux parasites puissent troubler le
fonctionnement du téléviseur.
Cette télécommande à
infrarouge IBF 9 ITT est essentiellement constituée de deux circuits intégrés
spécifiques de codage : le SAA 1250, et de décodage : le SAA 1251 et
du circuit intégré TEA 1009 de préamplification. Le schéma de la
(figure 34)
donne le synoptique de ce système de télécommande.
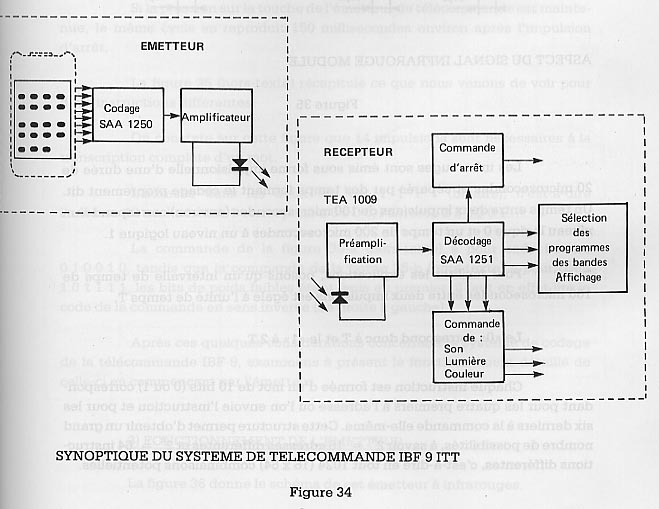{kind=link}
2)
Principe du
codage
Le principe du codage de
cette télécommande est tout à fait différent de ceux que nous avons vus
précédemment. La transmission des commandes se fait par rayons infrarouges
modulés en impulsions codées tels que le montre la (figure 35)
.
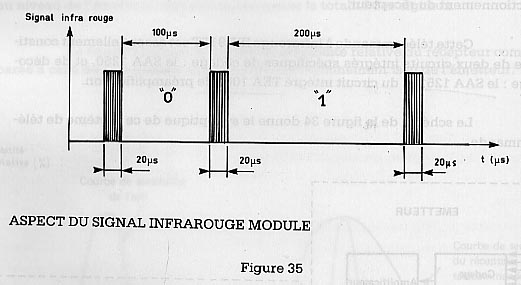{kind=link}
Les infrarouges sont émis
sous forme impulsionnelle d’une durée de 20 microsecondes et séparés par des
temps formant le codage proprement dit. Un temps entre deux impulsions de 100
microsecondes environ correspond à un niveau logique 0 et un temps de 200
microsecondes à un niveau logique 1.
Pour faciliter les
explications, posons qu’un intervalle de temps de 100 microsecondes entre deux
impulsions est égale à l’unité de temps T : le 0 correspond donc à T et le
1 à 2T.
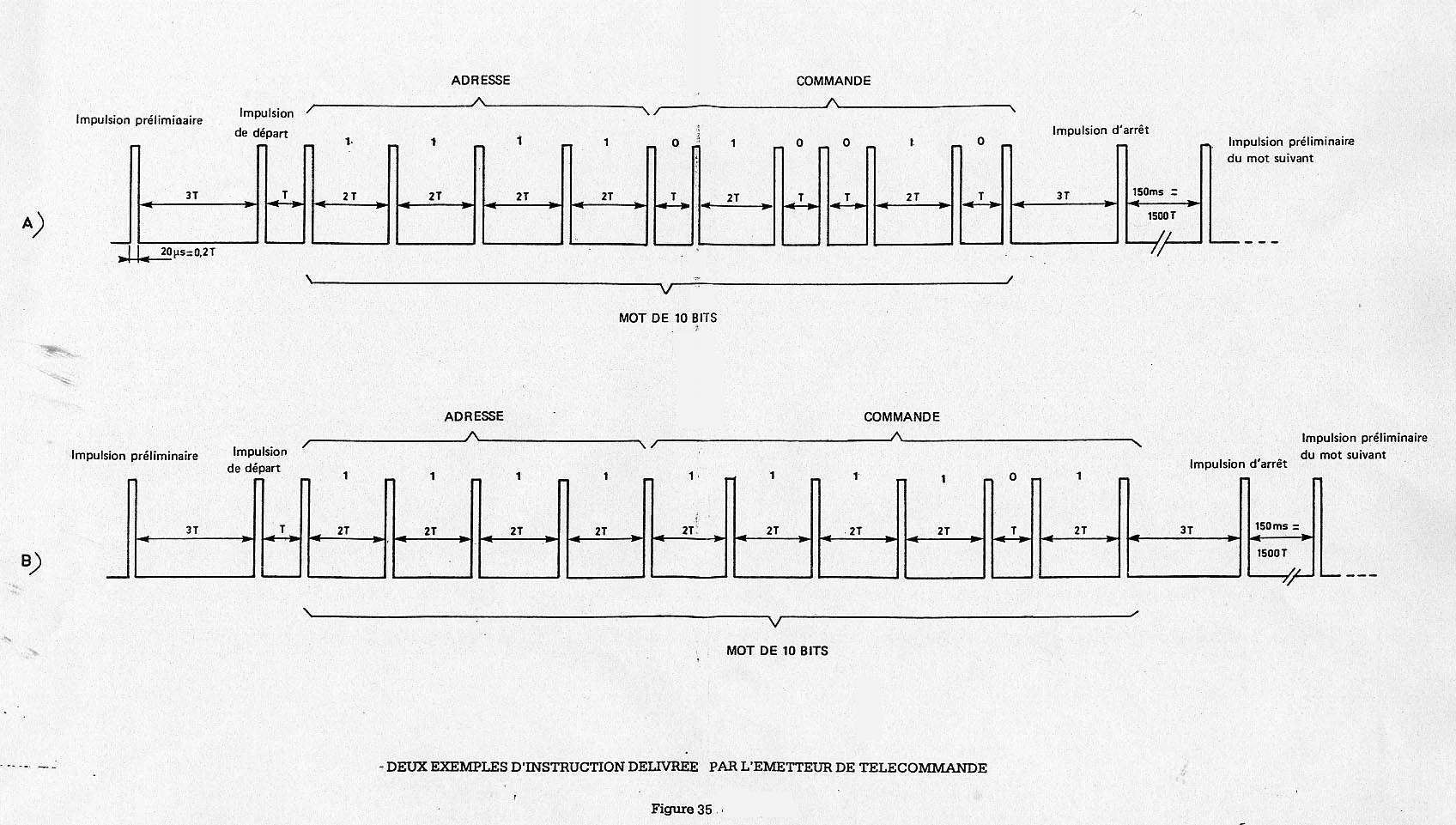
Chaque instruction est
formée d’un mot de 10 bits (0 ou 1) correspondant pour les quatre premiers à
l’adresse où l’on envoie l’instruction et pour les six derniers à la commande
elle même. Cette structure permet d’obtenir un grand nombre de possibilités, à
savoir 2 x 4 = 16 adresses différentes et 2 x 6 = 64 instructions différentes,
c’est à dire en tout 1024 (16 x 64) combinaisons potentielles.
En réalité, la télécommande
IBF 9 n’utilise qu’une seule adresse (1 1 1 1 ), ce qui permet encore 64
commandes différentes dont seulement 17 sont exploitées.
En fonction du code binaire
des instructions, les mots de 10 bits n’auront pas la même durée. Plus
l’instruction utilise de 1 binaires, plus le mot durera longtemps.
Chaque mot de 10 bits (formé
donc par 11 impulsions), est précédé de deux impulsions : l’une appelée
impulsion préliminaire est suivie 3T plus tard par la seconde appelée impulsion
de départ, les impulsions formant le mot, commencent 1T après cette impulsion
de départ.
La dernière impulsion du mot
est suivie 3T plus tard d’une impulsion d’arrêt. Si la pression sur la touche
de l’émetteur de télécommande est maintenue, le même cycle se reproduit 150
millisecondes environ après l’impulsion d’arrêt.
La (figure 35b) récapitule
ce que nous venons de voir pour deux instructions différentes. On constate sur
cette figure que 14 impulsions sont nécessaires à la transcription complète
d’un mot. L’adresse dans les deux cas est 1 1 1 1 (binaire), c’est à dire
l’adresse 16 car l’adresse 1 correspond à 0 0 0 0, l’adresse 2 à 0 0 0 1.
{kind=link}
La commande de la
(figure 35b-
a) a pour code binaire 0 1 0 0 1 0, tandis que la commande de la
(figure 35b-
b) a pour code 1 0 1 1 1 1, les bits de poids faibles étant émis en premier, il
faut en effet lire le code de la commande en sens inverse (de droite à gauche).
3)
Fonctionnement
de l’émetteur
La (figure 36) donne le
schéma de cet émetteur à infrarouges. Le circuit intégré SAA 1250 est un
circuit à 24 broches réalisé en technologie C MOS.
{kind=link}
Il peut fonctionner selon
quatre modes d’adressage différents selon les tensions appliquées sur les
broches 6 et 7. Un seul est employé dans cette télécommande, c’est l’option
1 : le premier message est transmis avec l’adresse 1 (code 0 0 0 0 )
quelques 20 millisecondes après avoir appuyé sur la touche de l’émetteur, les
messages suivants ont tous l’adresse 16 (code 1 1 1 1) comme nous l’avons vu
précédemment et se succèdent toutes les 150 millisecondes environ.
La (figure 37) donne le
schéma synoptique interne du circuit SAA 1250 et le câblage du clavier de la
télécommande.
{kind=link}
Le décodeur d’option analyse
les niveaux de tension présents aux broches 6 et 7, en déduit l’adresse
sélectionnée et la signale au convertisseur parallèle série qui code l’adresse
sous forme de bits série. Dans cette télécommande, la bascule de sélection des
adresses libres est maintenue constamment à zéro ce qui a pour effet d’inhiber
le registre d’adresses, nous ne nous en occuperons donc pas dans l’explication
du fonctionnement.
Lorsque l’on actionne une
touche du clavier, il se produit un contact entre une des 8 lignes A, B, C, D,
E, F, G ou H et une des 3 colonnes a, c, ou f.
Remarquons que 3 colonnes
seulement sont utilisées alors que le circuit possède 8 entrées a, b, c, d, e,
f, g et h de colonnes ce qui est suffisant puisque sur ces 8 x 3 = 24
possibilités, 17 seulement sont employées.
Les informations issues du
clavier sont prises en compte par un circuit d’identification ligne et colonne
et sont transmises au codeur dont le rôle est de transformer ces informations
deux fois 1 parmi 8 en une information de 6 bits parallèles.
Avec ces 6 bits, nous
conservons bien ![]() = 64 possibilités. Un
convertisseur parallèle série transforme cette information parallèle en un
message série qui, après amplification dans l’étage de sortie, est disponible à
la broche 5 du circuit.
= 64 possibilités. Un
convertisseur parallèle série transforme cette information parallèle en un
message série qui, après amplification dans l’étage de sortie, est disponible à
la broche 5 du circuit.
A titre indicatif, les codes
binaires correspondant à chaque commande du clavier sont donnés dans le tableau
de la (figure 38) .
{kind=link}
On peut observer sur cette
figure que le code correspondant à l’action désirée est directement lié à la
ligne et à la colonne mises en contact au niveau du clavier. Ainsi :
·
Lorsque la
colonne a est utilisée, les trois premiers bits du code sont : 0 0 0
·
Lorsque la
colonne c est utilisée, les trois premiers bits du code sont : 0 1 0
·
Lorsque la
colonne f est utilisée, les trois premiers bits du code sont : 1 0 1
De même, la ligne employée
détermine les trois derniers bits du code. Ainsi, lorsque la ligne G est
utilisée, les trois derniers bits du code sont : 1 1 0.
Au niveau du circuit SAA
1250 (figure 37) , un étage de logique de commande
détermine la durée des différentes séquences délivrées par le convertisseur
parallèle série comme la durée entre chaque impulsion, l’intervalle de temps
entre chaque message.
Ce circuit est lui même
piloté par le générateur d’horloge dépendant d’un oscillateur RC. Les
composants déterminant la fréquence de cet oscillateur sont externes au circuit
intégré et reliés aux broches 2, 3 et 4 de celui ci.
Un étage de mise en service
de l’oscillateur ne déclenche ce dernier que lorsqu’une des touches du clavier
est enfoncée. Ceci permet d’obtenir une consommation quasi nulle de l’émetteur
lorsque celui ci n’est plus en action.
Un circuit de contrôle
d’entrée vérifie par exemple que deux touches ne sont pas actionnées en même
temps, auquel cas cet étage bloque la sortie des signaux codés. Une vérification
a lieu toutes les 150 millisecondes.
Si le contact est interrompu
avant la fin de transmission d’un mot, ce qui a priori peut être souvent le
cas, ce mot est transmis intégralement, mais par contre, si la pression sur la
touche dure moins de 20 millisecondes, la commande n’est pas transmise.
Ajoutons qu’un effet de
rebond au niveau des touches du clavier n’a aucune conséquence sur le
fonctionnement du SAA 1250.
Le signal codé disponible
sur la broche 5 est envoyé à l’étage amplificateur dont la (figure 39) rappelle
le schéma.
{kind=link}
Pour obtenir une portée
suffisante de l’émetteur de télécommande, il est nécessaire de faire passer
dans les diodes émettrices d’infrarouges un courant assez important d’environ
un ampère. Il est donc nécessaire d’amplifier le signal délivré par le circuit
SAA 1250. C’est le rôle du transistor T2 qui est commandé en tout ou rien par
le transistor T1 monté en adaptateur d’impédance.
Quatre diodes émettrices
d’infrarouges LD 271 D1 à D4, câblées en un montage série parallèle, sont utilisées
pour obtenir un rayonnement suffisant permettant une commande du téléviseur
jusqu’à une quinzaine de mètres environ.
La diode D5 sert à éviter
tout passage de courant lorsque l’on connecte la pile de 9 volts à l’envers. La
consommation de l’ensemble est réduite du fait que les temps de conduction des
transistors sont très faibles par rapport aux temps de blocage, la production
de rayons infrarouges n’intervenant que pendant les impulsions
(figure 35) . Une impulsion dure 20 microsecondes soit 0,2 T. Les
quatorze impulsions constituant un mot durent donc à peine 3T, alors que le
temps séparant les deux impulsions préliminaires de deux mots successifs durent
environ 1525T. Pendant les périodes de fonctionnement, l’émetteur consomme donc
réellement pendant ![]() =
= ![]() du temps, ce qui est très faible d’où le
gros intérêt de ce système de codage pour la longévité de la pile
d’alimentation de l’émetteur.
du temps, ce qui est très faible d’où le
gros intérêt de ce système de codage pour la longévité de la pile
d’alimentation de l’émetteur.
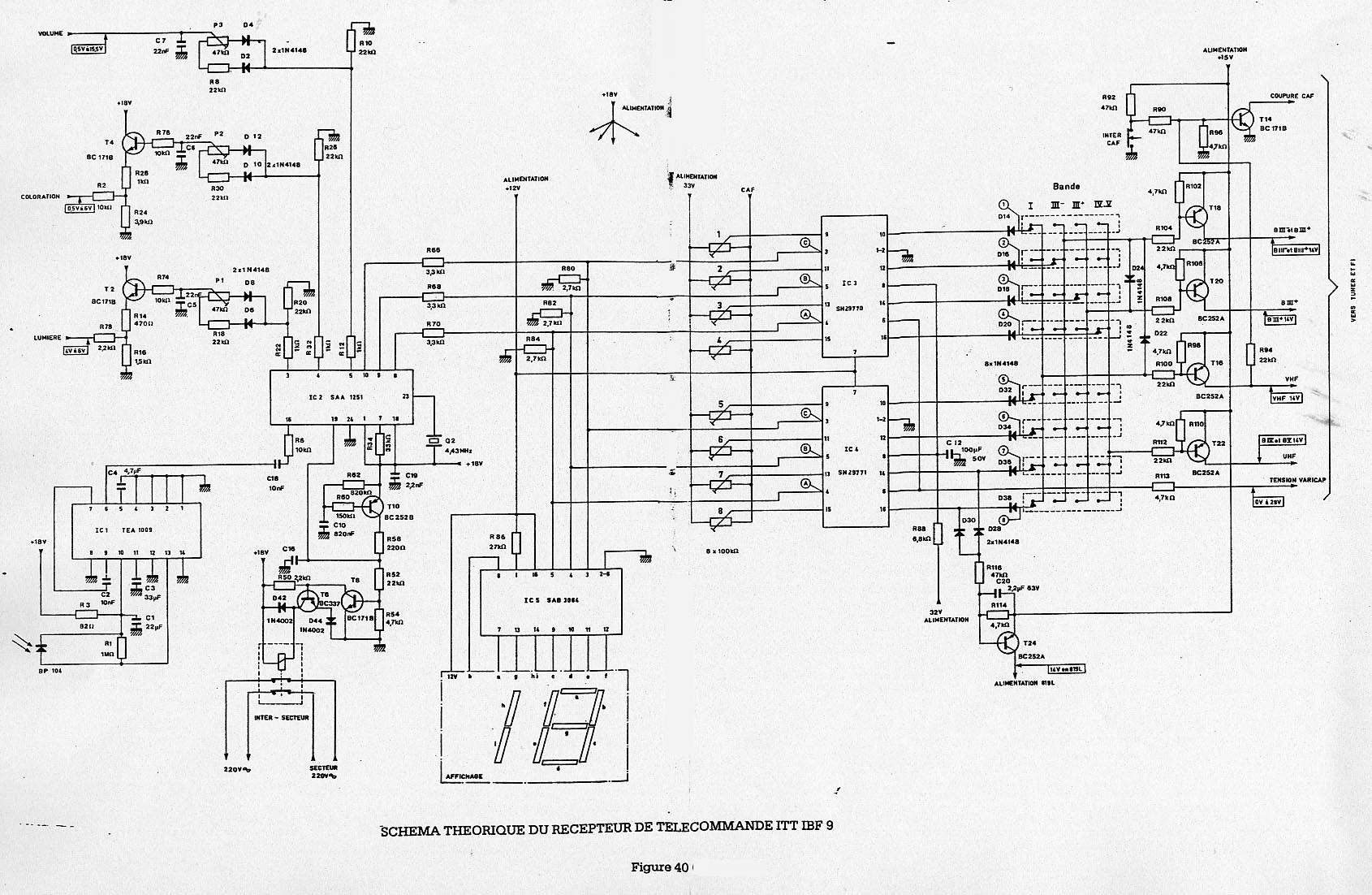
4) Fonctionnement du
récepteur de télécommande
La (figure 40) donne le
schéma théorique du récepteur. Les rayons infrarouges captés par la photodiode
BP 104 sont amplifiés par le circuit intégré TEA 1009. La diode réceptrice
travaille avec une résistance de charge dynamique constituée par un transistor
appelé transistor de CAG inclus dans le circuit intégré.
{kind=link}
Ce transistor est mis en
conduction grâce à la capacité C4 mémoire de 4,7 microfarads connectée à la
broche 5 qui se charge lors de l’impulsion préliminaire. La résistance
dynamique du transistor constitue alors une résistance de charge optimale pour
la diode réceptrice. Grâce à une constante de temps de décharge de C4
suffisamment grande, cet état se prolonge pendant toute la durée du message,
assurant en sortie des signaux d’amplitude maximale.
Par contre, en l’absence de
tout message, le condensateur C4 n’est pas chargé et le transistor de CAG
possède alors une résistance dynamique telle, que la diode réceptrice ne
fonctionne plus dans des conditions correctes : les signaux infrarouges
inclus dans la lumière ambiante sont donc très peu amplifiés ce qui évite toute
perturbation au niveau du récepteur de télécommande.
Le circuit intégré TEA 1009
possède également en sortie un circuit suppresseur de bruit dont fait partie le
condensateur C2 de 10 nanofarads (broches 7 et 9).
Les signaux amplifiés
sortent du circuit par la broche 6 et sont envoyés à la broche 16 du circuit
intégré SAA 1251 dont la (figure 41) donne le schéma synoptique interne.
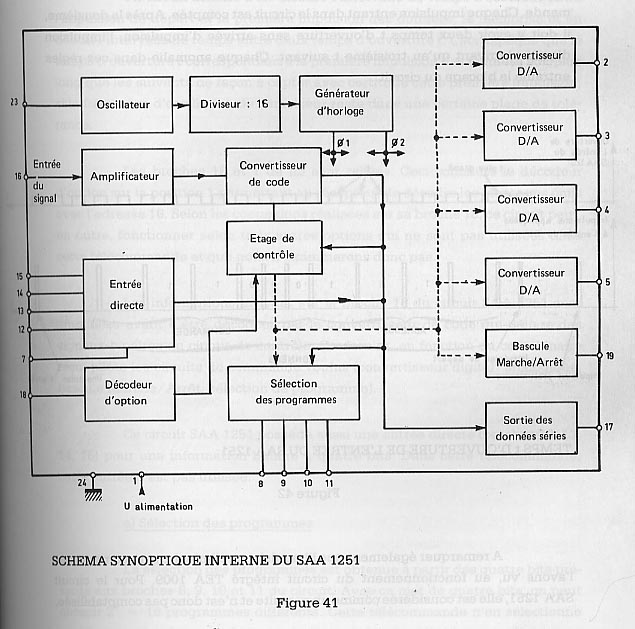{kind=link}
Afin d’augmenter encore
l’immunité aux parasites, l’entrée du circuit intégré IC2 SAA 1251 est
verrouillée après chaque impulsion et ne se rouvre que 100 microsecondes
environ plus tard pour une durée t très courte (environ 25 microsecondes) juste
suffisante pour capter une impulsion s’il s’en présente une.
Avec ce fonctionnement, on
remarque qu’une impulsion doit être analysée au moins tous les deux t
(figure
42) . Dans le cas contraire, le cycle est interrompu.
Ceci se produit en cas d’anomalie ou après la dernière impulsion de commande.
Chaque impulsion entrant dans le circuit est comptée. Après la douzième, il
doit y avoir deux temps t d’ouverture sans arrivée d’impulsion, l’impulsion
d’arrêt n’arrivant qu’au troisième t suivant. Chaque anomalie dans ces règles
entraîne le blocage du circuit.
{kind=link}
A remarquer également que
l’impulsion préliminaire sert, comme nous l’avons vu, au fonctionnement du
circuit intégré TEA 1009. Pour le circuit SAA 1251, elle est considérée comme
un parasite et n’est donc pas comptabilisée.
L’émetteur de la
télécommande ne contient pas de quartz mais un simple oscillateur RC. Le temps
de 100 microsecondes séparant au minimum deux impulsions est donc assez peu
précis. Le circuit intégré SAA 1251 est, lui, piloté par un quartz à 4,43
mégahertz. Cette fréquence est divisée par 16, ce qui permet d’obtenir deux
signaux d’horloge à 277 kilohertz
f1 et
f2 déphasés de 180° commandant les divers étages du circuit intégré.
Un circuit interne à IC2
mesure l’intervalle de temps s’écoulant entre l’impulsion de départ et la
première impulsion des données, le mémorise et en déduit l’intervalle de temps
entre deux temps d’ouverture t. Ceci explique que le temps d’ouverture t
correspondant à la première impulsion des données soit plus long que les
suivants de façon à capter avec certitude cette première impulsion, si la
fréquence d’oscillation de l’émetteur reste dans une certaine plage de
tolérance.
Les broches 18 et 1 de IC2
sont reliées. Ceci commute le décodeur d’option sur la position 1 permettant au
récepteur de décoder les messages émis avec l’adresse 16. Selon les connexions
réalisées sur sa broche 18, ce circuit peut, en outre, fonctionner selon trois
autres options qui ne sont pas utilisées dans cette télécommande et que nous
n’examinerons donc pas.
Les informations arrivant
sur la broche 16 du circuit intégré SAA 1251 sont amplifiées avant d’être
décodées par le convertisseur de code qui délivre des signaux binaires au
circuit de contrôle. Ce dernier, en fonction du code binaire reçu, pilote les
circuits de commande voulus (convertisseur digital / analogique, bascule marche
arrêt, sélection de programme).
Ce circuit SAA 1251 possède
aussi une entrée directe (broches 12, 13, 14, 15) pour une information binaire
à quatre bits. Dans cette télécommande, cette entrée n’est pas utilisée.
a)
Sélection
des programmes
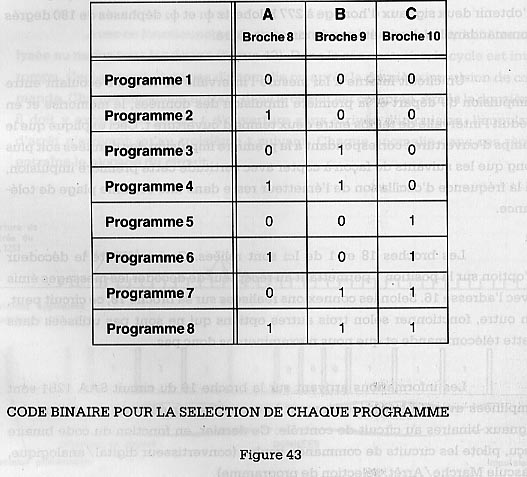
La sélection des programmes
est obtenue à partir des quatre bits présents aux broches 8,9, 10 et 11 du
circuit. Avec ce mot de quatre bits, on peut obtenir ![]() = 16 programmes
différents. Cette télécommande n’en sélectionne que 8 et n’utilise donc que 3
bits seulement : la broche 11 n’est pas utilisée.
= 16 programmes
différents. Cette télécommande n’en sélectionne que 8 et n’utilise donc que 3
bits seulement : la broche 11 n’est pas utilisée.
Le tableau de la
(figure 43)
donne à titre indicatif le code binaire correspondant à la sélection de chacun
des 8 programmes possibles.
{kind=link}
Les trois bits, formant le
code présent aux broches 8, 9, et 10 du circuit, ont été appelés respectivement
A, B et C.
Ce code A B C est appliqué
simultanément aux entrées 3, 4,5 des deux circuits SN 29 770 et SN 29 771 qui
vont en réalité décoder cette information et sélectionner le programme désiré.
La (figure 44) donne le
synoptique de ces deux circuits. Ceux ci sont pratiquement identiques hormis le
circuit inverseur présent à l’entrée 3 du second.
{kind=link}
Ces circuits, en fonction du
code A B (![]() = 4 possibilités) appliqué à leurs entrées 4 et 5,
sélectionnent chacun une voie parmi quatre voies. Toutefois, pour être
opérationnel, il faut qu’un niveau 0 soit appliqué à l’entrée de validation du
circuit de sélection. C’est le bit C qui effectue ce choix puisqu’il est
appliqué aux entrées 3 des deux circuits. Prenons un exemple pour bien
comprendre le fonctionnement.
= 4 possibilités) appliqué à leurs entrées 4 et 5,
sélectionnent chacun une voie parmi quatre voies. Toutefois, pour être
opérationnel, il faut qu’un niveau 0 soit appliqué à l’entrée de validation du
circuit de sélection. C’est le bit C qui effectue ce choix puisqu’il est
appliqué aux entrées 3 des deux circuits. Prenons un exemple pour bien
comprendre le fonctionnement.
Admettons que le code A B C
= 001 sorte du SAA 1251. Le bit C étant à 1, le circuit SN 29 770 est bloqué
mais comme le bit C passe par un inverseur dans le SN 29 771. Celui ci est mis
en service : le code A B = 00 appliqué à ses entrées 4 et 5 sélectionne la
première voie, c’est à dire le programme 6.
Les tableaux de la
(figure
45) indiquent les sorties commutées en fonction du code A B C appliqué aux
entrées 4, 5 et 3 des deux circuits.
{kind=link}
Ce code A B C appliqué aux
entrées persiste tant qu’une information contraire n’est pas envoyée de
l’émetteur.
Lorsque le téléviseur est
mis sous tension, le code 000 est appliqué automatiquement et c’est donc le
premier programme qui se trouve sélectionné. Reportons nous aux
(figure 40) et
(figure 44)
-
Dans le
circuit SN 29 770, l’interrupteur situé en série avec la sortie 9 se
ferme : la tension préalablement ajustée avec le potentiomètre d’accord 1
est appliquée à l’étage de sortie du circuit et se retrouve à la sortie 6. Elle
est alors envoyée au tuner pour lequel elle constitue la tension de commande
des diodes varicaps.
-
Par ailleurs,
la sortie 10 du SN 29 770 passe à l’état bas, ce qui fait conduire la diode
D14. Le commutateur de bande étant réglé sur la bande I pour ce programme 1, le
transistor T16, qui était bloqué, reçoit un front négatif de tension sur sa
base et se sature. Son collecteur passe à une tension d’environ 14 V, ce qui
assure les commutations voulues au niveau du tuner et des étages FI.
Ainsi selon la position
choisie pour les commutateurs de bande et le programme sélectionné, c’est un
des transistors T16, T18, T20 ou T22 qui va se saturer entraînant les
commutations nécessaires dans le tuner ou les étages FI. Dans certains cas
(bandes III![]() et III
et III![]() ), c’est même deux ou trois transistors qui sont portés à
saturation :
), c’est même deux ou trois transistors qui sont portés à
saturation :
-
T18 et T16
pour la bande III![]() grâce à la diode D22 qui conduit
grâce à la diode D22 qui conduit
-
T20, T18 et
T16 en bande III![]() grâce aux diodes D24 et D22 rendues conductrices
grâce aux diodes D24 et D22 rendues conductrices
En bandes I, III ![]() et III
et III![]() , c’est à dire en VHF, le transistor T16 est toujours saturé.
Sur le collecteur de ce transistor est relié via R94, la base du transistor T14
qui se sature également entraînant la coupure du CAF (contrôle automatique de
fréquence) inopérant en VHF. Cette coupure du CAF peut être également obtenue
manuellement pour les réglages par un interrupteur manuel que l’on ouvre.
, c’est à dire en VHF, le transistor T16 est toujours saturé.
Sur le collecteur de ce transistor est relié via R94, la base du transistor T14
qui se sature également entraînant la coupure du CAF (contrôle automatique de
fréquence) inopérant en VHF. Cette coupure du CAF peut être également obtenue
manuellement pour les réglages par un interrupteur manuel que l’on ouvre.
Une autre commutation est
prévue au niveau des programmes 7 et 8 qui commutent le téléviseur en standard
819 lignes.
En effet, lorsque l’un ou
l’autre programme est choisi, la diode D28 ou D30 devient conductrice et envoie
sur la base du transistor PNP T24 un front négatif de tension. Celui ci se
sature et son potentiel de collecteur passe à 14 volts environ, ce qui permet
d’effectuer les différentes commutations nécessaires au fonctionnement du
récepteur en 819 lignes.
b)
Affichage
du programme reçu
En même temps qu’il est
envoyé aux deux circuits SN 29 770 et SN 29 771, le code CBA délivré par le
circuit SAA 1251 (broches 10, 9, 8) est appliqué à un circuit intégré SAB 3064
dont le rôle est de gérer un afficheur de neuf segments. Cet ensemble est
représenté par la (figure 46) .
{kind=link}
Le circuit SAB 3064 est
formé d’un additionneur + 1 et d’un décodeur binaire – 9 segments. Il est
nécessaire d’ajouter 1 au code CBA reçu car le code CBA 000 correspond au
programme 1, le code CBA 001 correspond au programme 2….. Après cet
additionneur se trouve le décodeur qui gère l’afficheur.
Cet affichage se compose de
neuf segments répartis comme suit :
·
Sept segments
qui forment ce que l’on appelle un digit permettant d’afficher un chiffre
compris entre zéro et neuf en fonction des segments que l’on allume
(figure 47
b) .
{kind=link}
·
Deux segments
formant un demi digit qui affiche un 1 lorsqu’ils sont allumés
(figure 47 a) .
A l’aide de ce digit et
demi, il est donc possible d’afficher un nombre compris entre zéro et dix neuf.
Dans le cas qui nous intéresse, le demi digit n’est jamais allumé et l’on
utilise le digit que pour afficher les nombres de 1 à 8 (n° du programme).
Pour ce faire, le décodeur
commande huit interrupteurs intégrés dans le SAB 3064 et qui court circuitent
les segments voulus pour faire apparaître le chiffre décimal correspondant au
code binaire CBA reçu plus 1. Les segments sont, en réalité, des diodes LED
dissimulées derrière des fenêtres opaques en forme de segment.
L’afficheur 9 segment est
divisé en deux groupes de plusieurs LED en série, 4 pour l’un (a, b, c, d), 5
pour l’autre (e, f, g, h, i).
Cette disposition a
l’avantage de diminuer considérablement la consommation de l’afficheur mais
impose l’utilisation d’un générateur de courant constant situé dans le circuit
SAB 3064 et ceci pour chacun des deux groupes de LED. Un réglage de brillance
peut être effectué en changeant la valeur de la résistance R86 connectée à la
broche 1 du circuit intégré.
c)
Commande
d’arrêt
La (figure 48) rappelle le
schéma de la commande d’arrêt du téléviseur ainsi que celle de lumière, de
saturation et de volume sonore.
{kind=link}
A la mise sous tension du
téléviseur, le condensateur C10 placé dans la base du transistor T10 se charge.
Il peut être alors considéré comme un court circuit, ce qui a pour effet de
saturer le transistor T10. De ce fait, son collecteur est à un potentiel voisin
de 18 volts (tension d’alimentation), ce qui entraîne la saturation du
transistor T8 dont la base est reliée à ce collecteur
via R58 et R52. La saturation de T8 impose le blocage du transistor T6 et les
contacts du relais secteur restent collés dans leur position de repos, le
téléviseur reste alimenté.
Simultanément, la tension
élevée du collecteur de T10 est envoyée via R58 à la broche 19 du circuit SAA
1251 pour commuter la sortie de la bascule marche / arrêt en position haute.
Ainsi, le système est maintenu dans l’état que nous venons de décrire, aussi
longtemps qu’une commande d’arrêt n’est pas envoyée.
Lorsque l’on agit sur la
commande d’arrêt, la bascule marche / arrêt est commutée et la broche 19 passe
à un potentiel bas (environ 0 volt). La base de T8 se trouve également mise à
la masse. Ce transistor se bloque, ce qui entraîne la saturation de T6 dont la
base est reliée au + 18 volts à travers R50. Le relais est excité et les deux
contacts s’ouvrent interrompant l’alimentation secteur du téléviseur qui
s’arrête.
La diode D44 située dans
l’émetteur de T6 permet d’augmenter le seuil d’entrée en conduction de ce
transistor et de rendre ainsi le montage indépendant des variations de VCE de
saturation de T8 qui pourrait entraîner la commutation inopinée du relais en
faisant conduire T6 sans raison.
d)
Commandes
de lumière, de saturation et de volume
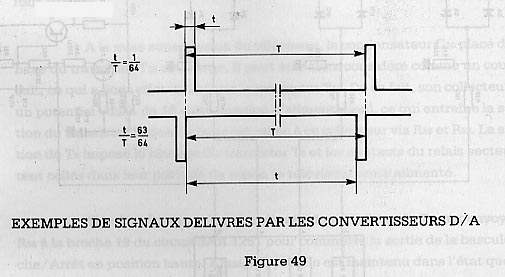
Les trois convertisseurs
digital analogiques, inclus dans le circuit SAA 1251, délivrent des signaux
rectangulaires à la fréquence de 15 625 hertz qui sortent du circuit aux
broches 3, 4 et 5.
Selon la commande de réglage
(lumière, saturation ou volume) envoyée par l’émetteur, le circuit SAA 1251
sélectionne le convertisseur intéressé qui va alors changer le rapport cyclique
du signal rectangulaire qu’il délivre. 63 valeurs de rapport cyclique peuvent
ainsi être obtenues. Ce rapport varie de ![]() à
à ![]() (figure 49) .
(figure 49) .
{kind=link}
Lorsque l’on appuie de façon
continue sur une touche de commande de ces réglages, le rapport cyclique change
toutes les 150 millisecondes en progressant d’un pas à chaque fois.
Pour réaliser l’excursion
totale, il faudra donc : 150 x ![]() x 63 = 9,45 secondes.
Le rapport cyclique du signal reste stable des que cesse la pression sur la
touche de réglage. Ces créneaux sont ensuite transformés en tension continue à
l’aide d’un circuit de charge et de décharge d’un condensateur. Prenons l’exemple
de la commande de lumière (figure 48) .
x 63 = 9,45 secondes.
Le rapport cyclique du signal reste stable des que cesse la pression sur la
touche de réglage. Ces créneaux sont ensuite transformés en tension continue à
l’aide d’un circuit de charge et de décharge d’un condensateur. Prenons l’exemple
de la commande de lumière (figure 48) .
Le signal rectangulaire est
appliqué à travers un diviseur de tension R22, R20 au circuit de charge et
décharge du condensateur C4 qui détermine la polarisation de base du transistor
de commande T2.
Pendant la partie haute du
signal en créneaux, le condensateur C4 se charge à travers la diode D6
conductrice, R18 et P1. Pendant la partie basse du signal, ce condensateur C4
se décharge à travers la diode D8 conductrice et P1.
Les temps de charge et de
décharge du condensateur sont très courts par rapport aux constantes de temps
de charge et décharge des circuits. On obtient donc aux bornes de C4, une
tension pratiquement continue qui constitue en fait une valeur moyenne du
signal rectangulaire en fonction évidemment du rapport cyclique de ce signal.
Cette tension continue
commande la polarisation de base du transistor T2, ce qui fait varier son
courant de collecteur et donc la tension au point commun à R14 et R16. Cette
tension ajustable est ensuite transmise via R78 au circuit intégré TCA 660 de
la platine chrominance où elle effectue le réglage de la lumière. Le principe
est exactement le même pour le réglage de saturation des couleurs.
Pour le réglage du volume
sonore, la tension aux bornes du condensateur commande directement le volume
délivré par le circuit amplificateur BF.
Au démarrage du téléviseur,
les 3 convertisseurs digital analogiques délivrent automatiquement des signaux
rectangulaires de rapport cyclique tel que la lumière et la saturation sont réglés
à la moitié du niveau maximum. C’est à ces niveaux que la touche idéal ramène
ces trois réglages lorsqu’elle est actionnée.
Lors des changements de
programme, le convertisseur digital analogique, commandant la chaîne son,
délivre pendant 320 millisecondes un signal rectangulaire dont le rapport
cyclique est minimum de façon à couper le son et éviter tout craquement
désagréable dans le haut parleur lors de la commutation. La touche téléphone a
la même action lorsqu'elle est enfoncée.